
来源:亿欧
亿欧汽车11月12日消息,国内自动驾驶厂商Maxieye智驾科技于近日宣布推出“所罗门计划”。按这家初创企业的计划,“所罗门”平台将基于公司第二代前装量产前视产品IFVS-400,向智能驾驶行业开放全协议、开放原始数据、开放工具链支持。
换句话说,这个名为“所罗门”的开放平台可以简单理解为一个视觉图像领域的百度Apollo。通过连接上下游供应商,开放数据协议、应用层源代码等资源,解决主机厂L4级别研发部门的开发需求,共同合作推进项目落地并进而实现盈利。
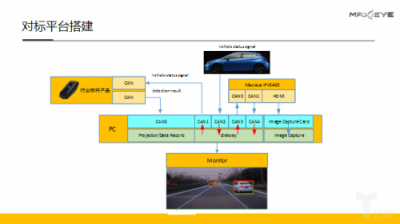
而为了证明自家业务能力,Maxieye创始人兼CEO周圣砚将其产品与某行业标杆级产品放在一个坐标系进行对比。
为了尽可能避免普遍存在的应用型对标、单一指标对标、不同算力平台对标等方式带来的片面性,Maxieye与对标产品使用了相近的设计参数:100万像素的镜头、分辨率1280*720的CMOS、HFOV52度的镜头;以及算力相当的计算资源:能够运行卷积神经网络的车规级ASIC芯片(TDA2X),并以此为基准列出了详尽的检测指标(详见产品对标视频)。
值得一提的是,相比2017年设计出的对标产品,今年年中才发布的IFVS-400在应对车厂L4级别自动驾驶的需求积累时占据了一定的研发时间优势。因此,针对非遮挡性目标识别、三维识别、小目标识别等功能,Maxieye进行了部分差异化调整。
其中,周圣砚指出,8*8小目标识别是现阶段深度学习的痛点。基于此,该公司选择了德州仪器的TDA2X芯片,并设计出了一种SOC网络架构——借助NPU专门解决卷积网络的计算,同时通过通用的CPU进行并行开发。上述产品目前运行功耗小于5W,同时符合车规级要求,通过了AEC-Q100标准认证。
在行业公认更加灵活的FPGA架构为量产主流的当下,这位技术出身的创业者始终认同一种说法:“CPU在不断改进,而市场上更广泛的NPU也不断出现,最终GPU和FPGA将会消失,留下最通用的CPU和最专用的NPU。”而这正是Maxieye强调的趋势:未来主要方案将是根据不同场景选择不同平台设计的NPU产品,与比较通用的CPU并行计算,这种路线才能将成本、性能及功耗实现最佳平衡。
直接点说,在算法流程符合这种SOC架构的前提下,Maxieye未来产品迭代时将省去重复设计架构的成本。理论上,这家初创企业4个月后便能推出全新产品IFVS-500,并在算法上实现进一步突破。
除了一贯坚持的算法架构之外,在具体功能上,该产品目前可以实现车辆检测、行人检测、路沿检测、灯光检测、限速限高牌及车道线检测。周圣砚在采访过程中透露,灯光检测功能主要是识别车头灯、车尾灯与路灯,该功能来自某top 2自主品牌的设计需求,预计明年6月量产。
而所罗门计划的“灵感”,恰恰是这种客户层面的倒逼,也就是Maxieye希望借助开源平台帮助从业者完成功能二次开发。具体操作分为四个关键层面:

开放协议架构:全目标协议CAN总线接口输出,底层及上层各个环节检测结果。
开放图像数据:开放图像原始数据,便于合作伙伴二次开发及算法集成。
开放开发工具:开放内部测试及融合开发供应链,便于合作伙伴调试及二次开发。
战略合作伙伴定制:结合其场景进行深度定制开发支持。
现阶段,所罗门计划已有约20个合作伙伴,公司内部规划明年能够支持100家企业的研发需求。这些客户涵盖了自动驾驶、人机交互、传感器、域控制器、执行器、低速车等各垂直领域企业,双方合作方式各不相同。具体而言:
针对HUD及数字仪表企业,Maxieye将为其提供:全协议目标图像坐标输出、全协议目标世界坐标输出、三维投影的C语言源代码;
针对激光雷达及具有相关融合需求的企业,Maxieye将为其提供:全协议目标图像坐标输出、全协议目标世界坐标输出、全协议目标角度坐标输出,以此对点云进行聚类,并通过融合更好地识别点云稀疏的远距离目标,降低对激光线数的依赖,降低系统成本;
针对地图采集企业,Maxieye将为其提供:车道线车辆局部坐标系中的三次曲线方程、路沿车辆局部坐标系中的三次曲线方程、停车线车辆局部坐标系中的坐标方程、斑马线局部坐标系的做表、包括隧道出入口等驾驶场景类别,基于上述信息,企业可以叠加由GPS提供的绝对坐标,产生目标的绝对坐标,从而生成地图;
针对自动驾驶定制客户,Maxieye将为其提供:更高纬度的车辆信息、定位元素识别、更准确的车道线识别(更高算力算法);
针对低速园区自动驾驶,Maxieye将为其提供:算力集中于30米内的高精度目标识别、算力集中于路沿,减速带及车道线的识别、全协议目标图像坐标/世界坐标/极坐标;
针对智能照明系统,Maxieye将为其提供:全协议目标世界坐标输出、全协议目标角度坐标输出、路灯目标坐标/车灯目标坐标输出、场景(隧道入口/出口等)输出;
此外,针对EPS执行器合作伙伴,Maxieye还将提供:车道线的三次曲线方程、车道线类别、车道线最远可信距离、车道分叉点以及相邻车道信息;
针对底盘执行器合作伙伴,Maxieye将提供:全协议车辆信息(相对距离,相对速度)、全协议行人信息(相对距离,相对速度)、全协议骑行者信息(相对距离,相对速度)。
然而,问及合作伙伴的具体情况,Maxieye却始终避而不谈。公司方面认为,在双方签署保密协议之后,通过客户的名声对外宣传是一种十分不专业的做法。说实话,作为一家年轻企业,Maxieye在业内的声量确实不算大,如今却基本“赤手空拳”地决定代替Mobileye用开源平台的方式打破行业底层感知的痛点。
在周圣砚看来,国际一级供应商的开放门槛很高,且收费标准高昂,一般创业公司只能拿到有限的应用层数据,很难在这个基础上进行二次开发。“整个行业对于数据及开放协议的需求旺盛,我们提供的是开发的标准版。举例来说,合作伙伴拿到图像协议后,可以研发出最合适自己的个性化功能,从而快速完成开发工作。”
话说回来,百度等科技巨头有能力开放平台,某种程度上也是依赖自身的名气背书,在形成规模效应上走了条捷径。成军仅仅3年的Maxieye此时选择成为视觉领域的“先行者”,却又拒绝借助主机厂的名义进行宣传。所罗门计划的效果能否达到预期,恐怕还得等待时间来验证。
免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。





























