

中国机器人领域规模最大、规格最高、国际元素最丰富的国际会议——WRC2019昨日正式在北京开幕,并同期举办2019世界机器人博览会。世界机器人博览会代表了机器人领域最新的科技成果和行业发展风向标,邀请了全球机器人领域的著名企业、高校和科研机构参加展示。因时机器人连续第二年受邀参与博览会,并带来了最新产品。

新款微型直线伺服驱动器发布

微型直线伺服驱动器是一种微小型一体化直线伺服系统。其内部集成了空心杯电机、行星减速器、丝杆机构、传感器以及驱动控制器,具有前馈补偿的位置闭环控制和末端运动规划功能。经典款LA系列微型直线伺服驱动器自面市以来广受好评,本次展会还最新发布了LAS、LAF及LASF三个系列微型直线伺服驱动器。四个系列产品的特性如下:
LA系列(共轴标准型):电机和丝杆机构旋转中心在一条直线上。特点:整体构型呈细长形,截面尺寸较小。
LAS系列(旁轴标准型):电机和丝杆机构的旋转中心不在一条直线上,通过齿轮传动平行布置。特点:整体长度更短,截面尺寸稍大。
LAF系列(共轴力控型):在LA系列基础上,增加了力传感器及相应的信号采集滤波算法,可以检测微型直线伺服驱动器实际的受力情况。
LASF系列(旁轴力控型):在LAS系列基础上,增加了力传感器及相应的信号采集滤波算法,可以检测微型直线伺服驱动器实际的受力情况。

“遥操作双臂移动机器人平台”惊艳亮相
遥操作双臂移动机器人平台是由因时机器人联合国承万通、松灵机器人及遨博智能共同打造的一款面向特种应用的机器人开发平台。操控端由动捕系统和力反馈外骨骼机械手构成,可以精确采集人体双臂位置信息以及手指的握力信息,并将机器人端的实际受力情况反馈到外骨骼机械手,实现力感知与力传递;机器人端由移动底盘、双臂协作机器人和灵巧手构成,可以在自主运动和远程遥控两种工作模式进行切换。
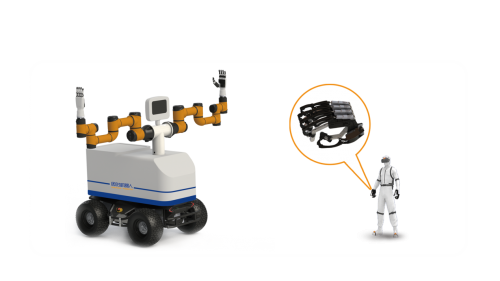
实现遥操作最为重要的一个环节是力感知和力控制。力反馈外骨骼机械手是一款穿戴式机械手产品,集成微型直线伺服驱动器、角度传感器和力传感器,可以实时采集和控制每一个手指的抓握力。
据悉,因时机器人目前正在招募渠道合作伙伴。此次因时发布的几款新品,或许将在行业内引发新一轮讨论。我们也期待因时机器人继续不断创新,给我们带来更多的惊喜。
- 大厂抢购算力资源:腾讯斥巨资从字节购GPU,新一轮算力竞赛拉开帷幕
- 马蜂窝AI旅行助手“AI小蚂”来袭,让旅行推荐更有依据,拒绝忽悠!
- 京东外卖上线前夕,刘强东与王兴酒桌密谈:外卖江湖,风起云涌?
- 贾跃亭承诺回国还债,股权收益一半用于还债,挑战与机遇并存
- 微软提醒:Win10用户升级Win11,为了更好的未来,请做好准备
- 360借条背后隐藏巨头:周鸿祎持股16%真相揭秘
- 智算数据中心升级新方案:Dell PowerEdge服务器性能提升67%,能耗降低50%,绿色智算未来已来
- 格力分红大手笔:董明珠分得2亿现金,慷慨回馈股东,超110亿大礼包派发
- 2025Q1大揭秘:小米逆袭领跑,华为销量独步,苹果何以在华节节败退?
- 贾跃亭回国悬疑:两年重振雄风,战略能否成功?
免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。





























