
未来,智能机器人很有可能成为继PC和智能手机之后的新一代杀手锏级别产品,极大的为我们的生活提供便利,但机器人产品的理想落地,需要行业各个技术环节的一起努力,自主定位导航作为机器人自主行走最为核心的技术,在落地实践过程中,也面临过多项挑战,最终实现完美应用。
环境多变情况下机器人的可靠定位
在实际的应用中,这些情况是比较常见的,例如:在人流量巨大的商场中机器人被一群人围着,不能出现“晕头转向”、“歇菜”、“定位偏”这种问题,它必须要应对不同的环境,明确知道自身所处位置,要去哪,该如何去?

出现这种问题,光靠单一的传感器肯定是不能解决所有问题的,例如,别人把激光雷达挡住了,激光雷达的数据就无法起作用了,这个时候就必须要依靠其他传感器,利用传感器和建立概率模型来解决问题。这是目前思岚科技所解决的一个实际问题,对于广大机器人厂商来说也是非常有利的。
障碍物的有效规避
很多人看到机器人的时候,总会忍不住想去逗逗它,故意挡在它前面,看看机器人会怎样,这个时候机器人就必须发挥它的避障功能了,在进行避障处理的时候,机器人不仅仅需要用到激光雷达,还需要其他传感器的有效融合,才能实现有效避障和自主导航。
思岚科技目前除了利用传感器避障之外,还使用了其自身开发的RoboStudio软件来帮助机器人更好的理解环境中的逻辑。例如,有些地方是不希望机器人进入的,这时候,我们就可以画一道虚拟墙,“阻拦”机器人进入。思岚科技的虚拟墙技术,完全基于软件设置,无需额外辅助铺设,无需改变现场环境,就可以让机器人对那个区域“避而远之”,限制机器人的活动范围。
用户心里预期的地图问题
激光雷达充当着机器人的“眼睛“,可为机器人提供高精度的地图及轮廓信息位置,但会出现一个问题,它所建立的地图与人所预期的地图是有差距的。
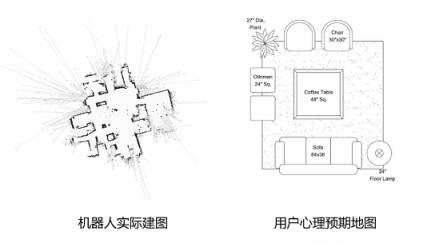
很显然,这是两种完全不同的地图呈现,在面对用户这一心理落差的时候,思岚科技利用高精细化建图技术,缩小实际建图与用户心理落差之间的距离。
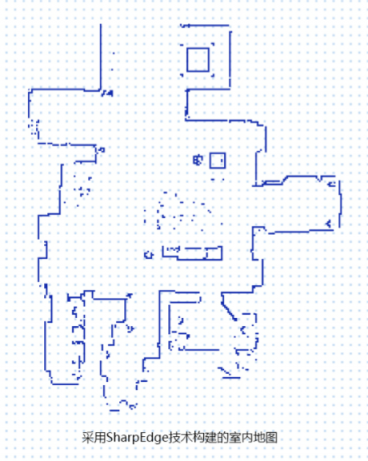
利用SharpEdge精细化建图技术的建图效果
这是直接从机器人中生成的300㎡家庭地图的实际案例,未做任何的PS处理,我们可以看到边缘还是相当规整的,没有任何噪点,可直接用于展示,无需再次修正。同样是SLAM的建图,思岚科技绘制的地图缩小了与用户心理的差距,也提高了定位导航的效率。同时,思岚还支持超大场景下的地图构建,形成完美闭环。
机器人自主定位导航技术要实际应用到各类产品中,必须要解决这些问题和挑战,最终才能实现完美应用。
- 大厂抢购算力资源:腾讯斥巨资从字节购GPU,新一轮算力竞赛拉开帷幕
- 马蜂窝AI旅行助手“AI小蚂”来袭,让旅行推荐更有依据,拒绝忽悠!
- 京东外卖上线前夕,刘强东与王兴酒桌密谈:外卖江湖,风起云涌?
- 贾跃亭承诺回国还债,股权收益一半用于还债,挑战与机遇并存
- 微软提醒:Win10用户升级Win11,为了更好的未来,请做好准备
- 360借条背后隐藏巨头:周鸿祎持股16%真相揭秘
- 智算数据中心升级新方案:Dell PowerEdge服务器性能提升67%,能耗降低50%,绿色智算未来已来
- 格力分红大手笔:董明珠分得2亿现金,慷慨回馈股东,超110亿大礼包派发
- 2025Q1大揭秘:小米逆袭领跑,华为销量独步,苹果何以在华节节败退?
- 贾跃亭回国悬疑:两年重振雄风,战略能否成功?
免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。





























