
当一家公司的产品进入前装,下一步会做什么?
Maxieye给出了自己的答案:开放图像数据、协议以及工具链,赋能整个行业,推进自动驾驶应用发展。
对于一家成立于2015年,相继拿下包涵TOP1和TOP2的多家商用车领域企业和包涵TOP2的多家乘用车领域企业的量产订单的前装供应商而言,是否到了向外界说开放的时间点?这个开放会有什么样的意义?
Maxieye CEO周圣砚信心满满的说道:对于公司的产品,自己有足够的信心,开放技术平台,是因为当下行业内有很多迫切的需求,需要依赖视觉相关技术的赋能,但行业内并无先例。
因此Maxieye希望能够通过开放自己的技术,让更多行业内厂商释放能力,共同推进汽车的智能化。迈出这一步对于公司而言,有挑战也有机遇,公司希望能够迎难而上。为此,也为开放平台取了一个特殊意义的名字:所罗门计划。
所罗门计划
所罗门计划的核心,是四部分:开放协议架构、开放图像数据、开放开发工具、战略伙伴定制。

在自动驾驶中,有感知传感器厂商、人机交互厂商、也有域控制器、无人驾驶厂商,各个厂商都有自己所擅长的地方,作为国内汽车产业链内的新势力,要进入前装供应链,需要的是产业链上下游的合作,单打独斗无法形成战斗力。
作为视觉为主的供应商,Maxieye希望首先开放自己的技术平台,促进上下游的深度合作。所罗门计划开放的宗旨,也是围绕这个核心来进行。
开放协议架构方面,包括全目标协议CAN总线接口输出,底层及上层各个环节检测结果;开放图像原始数据,便于合作伙伴二次开发及算法集成;开放内部测试及融合开发工具链,便于合作伙伴调试及二次开发;对于战略合作伙伴,将结合其场景进行深度定制开发支持。
举例而言,所罗门计划将会为HUD以及数字仪表的用户,提供全协议目标图像坐标输出、世界坐标输出、三维投影的C语言源代码,帮助用户更便捷的调试产品性能;激光雷达用户也能获得全协议目标图像坐标输出、世界坐标输出和角度坐标输出;图商可获得车道线、停车线、斑马线等的坐标系方程,用户可叠加由GPS的绝对坐标,产生目标的绝对坐标,从而生成地图。
对于自动驾驶客户而言,能获得更高纬度的车辆信息、定位元素识别、更准确的车道线识别(更高算力算法),以及针对特定使用场景的相关数据。比如低速自动驾驶中算力集中于30米内的高精度目标识别、算力集中于路沿,减速带以及车道线的识别等。
另外对于自动驾驶的执行器机构,也能获得车道线的三次曲线方程、车道线的类别、车道线的最远可信距离、车道分叉点以及相邻车道信息,全协议车辆信息(相对距离,相对速度)、全协议行人信息(相对距离,相对速度)、全协议骑行者信息(相对距离,相对速度)。
可以看出,所罗门计划可以服务的用户,囊括了自动驾驶的感知、执行、决策部分,但核心还是围绕视觉技术。开放平台在这个时代并不鲜见,但大多数人脑中对于开放的概念,还是基于大公司整合产业链的平台,那么对于一家初创的公司,如何说服别人使用自己的平台呢?
像素级对标的实力
周圣砚表示:能够开放平台,首先要对自己的技术有自信,既不怕抄袭,也能得到业内认可。如此,平台才不会形同虚设,渐成行业标准。
国产供应商在向OEM推荐产品时,常常会被拿来同国际厂商的产品作对比,各个厂商在宣传自己的产品时,也会做这样的横向比较,以证明自己的实力。但在形形色色的对比中,到底什么才是真的体现实力的对比?而不是单项冠军,全项平平?
周圣砚认为,在这些对比中,有不少的误区,比如应用型对标、单一指标对标、不同算力平台的对标。
仅仅通过对比有些应用型功能指标,比如TTC,THW和LDW等指标,不具有说服力,这些指标在支持技术门槛比较低的报警类应用时勉强可以适用,当应用于控制类以及自动驾驶等方面时,往往需要更多的性能指标;
而在识别距离上,也并不是越远越好,为了符合实际应用,视觉方案商通常都会选择52度的镜头,兼顾远近距离障碍物的探测和视野,单纯追求识别距离远并无实际应用意义。
算力平台越高大上,理论上可以得到更漂亮的数据,但实际车规量产的产品,不可能随心所欲的增加算力,往往是在算力、功耗、实际需求、价格等多方面做出取舍,达到一个平衡。
因此,周圣砚认为,相对合理的对比标准,应该包含三点:相近的设计参数、计算资源、详细的检测指标。
公司的产品使用了分辨率为CMOS(1280*720),相近的镜头HFOV52度;用了一款算力普通,能够运行卷积神经网络的车规级ASIC芯片(TDA2X);在此前提下,基于图像级的以及时间轴的详细的对比才比较合理。


经过对比,公司的产品在车辆检测率、识别距离、车道线曲率、车道线检测距离、车道线个数等指标上占有优势,其它指标基本持平或相对弱势。


周圣砚表示,作为国产供应商,事实上在一些方面具有一定的优势,比如地图的测量、车道线、道路环境的检测,相对拥有的自有度更高,因此可以在相应的技术指标上,有所领先。
另外一方面,国内OEM厂商有着五花八门的需求,如果供应商愿意去匹配,实际上有非常多的机会。当然这一切的前提,还是公司的基本实力要过关。也因此,公司成为了国内为数不多的几个拿下OEM前装订单的厂商。
特立独行的TDA2X?
谈到自动驾驶、深度学习,业内首选的都是GPU这种算力巨擘,但真的应用到行业中的,并没有多少。这是源于汽车行业以及本身市场的特性,产品品质要求高,同时价格要合适。
因此,在方向未定的时候,业内前装厂商,大多以灵活性较高的FPGA,作为算力平台的核心。
区别于传统做法,Maxieye使用了传统芯片厂商TI的TDA2X。其功耗小于5W,工作温度范围-40~85度,符合AECQ-100认证、内部的硬件层有深度学习处理器、DSP、ARM资源。
TDA2X可支持全高清视频(1920 × 1080p,60fps),多达 4 个嵌入式视觉引擎 (EVE),支持包括前置摄像头、泊车辅助、环视和单一架构上的传感器融合。
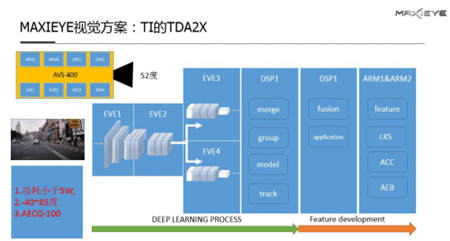
支持的功能有对象检测、行人检测、信号标志识别、车道检测和偏离警告、自动紧急刹车、自适应巡航控制、前部碰撞警告、远光灯辅助、车后物体检测、停车辅助,对感知传感器的原始数据也能融合。
周圣砚认为,TDA2X在性能和品质上符合车规的要求,是一款成熟的SOC。开发人员可灵活配置算力资源,应对不同场景的不同应用。在实际落地产品中,这些特性非常的关键。
对于业内所认为的深度学习算法还未完全定型,其表示针对不同场景的主流算法,已经到了定型的时候。在量产方案中,可以根据相应的需求做固定,并不是完全的变化莫测。
同时,他认为在硬件层面,更高算力的平台,传统芯片厂商都会在后续的产品中做出匹配,这并不是制约行业发展的因素。FPGA是一个过渡型的解决方案,未来SOC的处理器,一定是主流的方向。
Maxieye同TI方面,建立了良好的合作关系,在算力平台上会得到其支持。当然对于其他芯片平台也是开放的,因为本质上选择算力平台的话语权在OEM,作为供应商提供技术方案即可。
作为国内首家开放技术平台的公司,Maxieye有自己的梦想。到2019年年末,周圣砚希望将自己的平台合作伙伴从现在的20家扩展到100家,而这些伙伴将同自己一起,完成更多的前装订单。
国内供应商目前已有百家左右,未来几年一定会优胜劣汰,最终剩下几家真正的前装供应商。Maxieye将自己定位于自动驾驶领域的赋能者,不仅要占据一定市场,还要推动行业的快速发展,此次推出所罗门计划,便是其中关键的一步。
未来能否长成参天大树,还需要更多时间的检验。
- 智驾领域智界就是第一?问界排第几?
- ChatGPT推出图片管理功能:AI创作更高效!
- 抵御关税冲击,美国PC市场2025年Q1逆袭:出货量激增12.6%,库存量将大增
- 全球电车风潮涌动:中国与欧洲领跑,同比增长29%的电动汽车销量新篇章
- AI编程大势所趋:半年内90%,一年内几乎全部代码由AI编写
- iPhone 17系列机模意外曝光,小米SU7 Pro交付时间吓坏用户
- 福耀科技大学获批,曹德旺回应:压力山大,批下来就要做好,求真务实才是关键
- 特斯拉Cybertruck新功能:FSD大更新,轻松实现停车启动、智能召唤与倒车,驾驶更智能!
- 大众汽车裁员风暴来袭:软件部门Cariad大刀挥向三成岗位,风雨飘摇中的裁员序幕?
- 保时捷扛不住压力裁员3900人:全球跑车销量王也难逃经济寒冬?
免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。





























