
从20世纪80年代以来,AGV(自动导引运输车)系统已经发展成为生产物流系统中最大专业分支之一,并出现产业化发展的趋势,成为现代化企业自动化设备不可缺少的重要组成部分。
在欧美发达国家,全自动AGV技术已经相当成熟,自动化程度完善,几乎完全不需要人工干预。技术先进性稍次之的便是以日本为代表的简易型AGV技术,追求简单实用,在日本和我国台湾企业中应用十分广泛。而在我国,随着物流系统的迅速发展,AGV的应用范围也在不断扩展,目前主“战场”集中在智能仓储AGV(无人搬运车)和无人配送车之间。
然而,不管是智能仓储AGV的室内拣选搬运,还是无人配送车的室外自主行驶,避障和导航显然是摆在眼前最至关重要的一步。二者的发展都将大大减免物流行业的人员成本,同时提高拣选配送效率。所以这两年,国内京东、顺丰、申通等行业巨头都在重点布局这方面,整个市场都在孜孜以求切实可行的避障导航方案。然而,最适合AGV避障导航的“眼睛”在哪里?

目前,AGV的避障技术中最为常见的传感器有红外线、超声波、激光以及视觉传感器。
红外:
红外传感器的应用,在我们的生活中就随处可见,遥控器、自动门等都是利用的红外感应原理。用于AGV避障的话,「三角测量原理」是红外传感器最常用的实现方式。
红外传感器包含红外发射器与CCD检测器,红外线发射器会向障碍物发射红外线,CCD检测器则负责接收被障碍物反射回来的射线,由于物体的距离D不同,反射角度也会不同,不同的反射角度会产生不同的偏移值L,将这些数据收集后进行计算,就能得出障碍物的位置,从而实现避障。
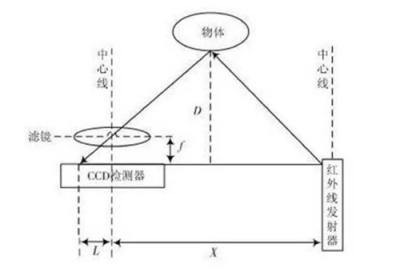
「三角测量原理」示意图
红外避障精度和成本都具有量产优势,但是受强光影响较大,假设搭载红外避障方案的AGV搬运车,需要到室外作业的话,那由于强光环境,红外避障的效果必将大打折扣。
超声波:
超声波测距的原理比红外线更简单,声波遇到障碍物反射,因为声波的速度已知,所以只需要知道发射到接收的时间差,就能轻松计算出测量距离,再结合发射器和接收器的距离,就能算出障碍物的实际距离。
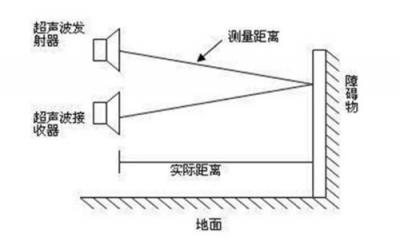
「超声波测距原理」示意图
超声波测距相比红外测距,价格更加便宜,但感应速度和精度相对逊色。因为声波随着发射距离的增大会有衰减,所以识别较远的障碍物的话精度会差不少。如果在作业过程中,遇到有海绵等吸收声波的物体包裹的货物需要分拣搬运,或者室外有大风,搭载超声波避障方案的AGV车就会无法工作。
激光:
激光(此处主要指单线激光)避障原理与红外线类似,也是通过激光的发射和接收来实现测距。不过激光传感器的发展历史较久,已经相当成熟。测量方式十分丰富,有类似红外的三角测量,也有类似于超声波的时间差+速度等。且激光避障的精度、反馈速度、抗干扰能力和有效范围都要明显优于红外和超声波。但如果仅是搭载单束激光,AGV车工作时获取障碍物信息将十分有限,会存在很大的安全隐患。而使用多束激光融合的方案的话,那成本又会激增。
视觉:
红外、超声波、(单束)激光测距,其实都只是一维传感器,可给出数据只有一个距离值,其实并不能真正完成对现实三维世界的感知。当然,激光技术发展程度高,多束激光排列组合的方式亦可实现视觉相似的感知,但组合激光方案的元件普遍价格贵、体积大、功耗高,造成的高成本对于AGV车的量产来说,并非良选。
所以,解决AGV车如何“看”的问题,也就是近年来常萦绕耳边的计算机视觉方案应运而生,深度摄像头市场开始迅速发酵。不同于以上三种方案的单一数据获取,视觉方案的基础在于如何能够从二维的图像中获取三维信息,从而帮助AGV车认识所处的三维世界,进行更灵敏安全的避障和导航。
为何是双目视觉胜出?
视觉识别系统又分单目、双目摄像头。单目摄像头因为缺少第三个维度的参照信息,所以获取到的图片数据信息十分有限,容易产生不确定性。就像2D电影和3D电影的观影区别,单目好似我们观看2D电影时的眼睛,因为类似单一照片,并无直接的空间感,所以我们在看的时候,会根据我们已知的“物体遮挡、近大远小”等生活经验进行脑补,从而来辅助得到电影中的每个物体的具体位置信息数据。而双目则像是观看3D电影,因为身临其境,所以对周围的每个物体的具体位置都能进行精准感知,具体认识环境。
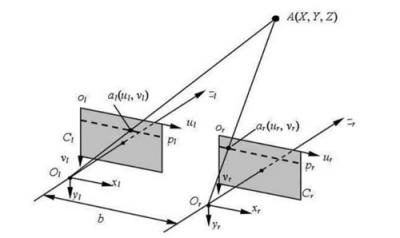
「双目测距原理」示意图
因此,双目摄像头其实是利用仿生学原理,通过标定后的双摄像头得到同步曝光图像,然后计算获取的2维图像像素点的第三维深度信息。在此基础上,双目摄像头可以实现环境感知、体感、建模、行为识别等各种应用。经此对比,拥有性价比高、原理简单、前景广阔、普遍适用等优势的双目视觉自然从众多方案中脱颖而出了。
双目硬件那么多,为何小觅双目摄像头备受物流巨头青睐?
智能仓储AGV(无人搬运车)需要规避因为货物掉落而造成的复杂避障场景,既要避开货物,还要防止与其他搬运车相撞推挤;无人配送车更是需要在复杂的室内外路况中拥有灵敏精准的环境感知功能。再考虑到前期研发投入与后期量产的成本把控需求,显然双目视觉方案是智能物流行业目前相对最好的选择。
但因为AGV车室内外需兼顾的作业场景,所以纯视觉方案无法完美满足它的避障需求。小觅双目摄像头作为一款优质融合方案的双目硬件产品,由此走入多家物流业翘楚的视线也就有迹可循了。
小觅双目摄像头具有哪些优势?
视觉+结构光+惯性导航融合的双目相机方案:室内外通用的3D传感器,适用室外强光环境,识别距离可达15m+,同时适用完全黑暗的室内环境,完美解决室内白墙和无纹理物体的识别难题。惯性导航可为VSLAM的应用提供精动的云端互补数据,相较其他单一方案拥有更高精度和鲁棒性。
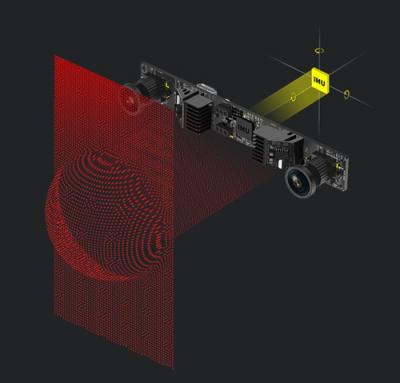
小觅双目摄像头系列产品方案示意图
高适应性和工控性能:通过富士康实验室的高温高湿持续工作、低温动态老化、整机正弦振动等十几项可靠性测试,具有极强的工控性能。同时采用自研全局快门技术,室内外感光自适应技术,自动白平衡技术,硬件级帧同步和IMU同步技术,保证提供实时稳定的图像源,应对复杂变化的室内外场景。
快速产品化和集成能力:小觅双目摄像头标准版版可提供基于CUDA的GPU实时加速方案,深度版版(未发售)可提供基于深度计算芯片的直出深度方案,无需上位机,并可提供最高720p/60fps的深度数据输出。此外,还提供丰富的SDK接口和VSLAM开源项目支持,可以帮助客户迅速进行方案集成,加速实现产品研发进程,实现方案的快速产品化和落地。
小觅双目摄像头还融合了视觉里程计(VIO)的技术。视觉里程计简单来说,就是「通过左右双目的图像,反推出视野中物体的三维位置」,所以相比光流+超声波技术只能简单的测出速度和高度,视觉里程计还能构建地面的三维模型,并通过连续的图像,跟踪自身与环境的相对移动,估计出自身的运动。准确测出自身与地面的相对位置。借此,搭载设备就可同时掌握障碍物的位置和自身的位置,精准的避障、导航路径规划自是变得轻而易举。
MYNTAI小觅智能相信,未来,除了智能物流领域,小觅双目摄像头还将拥有更广阔的应用领域。比如多场景的安防检测,准确识别异常人物或者物体故障,及时报警,有效规避更多突发意外情况;还可用于进阶的VR/AR眼镜,帮助盲人“看见”和安全行走;当然,更可充当各类机器人的“智慧之眼”,助力机器人实现流畅避障行走、与身处环境中的物体精准互动,实现真正的人工智能化,不再只是停留在“高级玩具”的尴尬阶段。
未来,MYNTAI小觅智能将一如既往得踏实前进,努力将小觅双目摄像头(MYNT EYE)系列产品发展成为行业领先的双目技术研发与应用硬件解决方案。
免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。





























