


科研团队:北京科技大学贺威团队
关键词:微型仿生扑翼;路径跟踪;室内定位验证
仿生扑翼飞行机器人因其出色的飞行机动性和较低的飞行成本等优点,在隐蔽侦察、环境监测等领域展现出广阔的应用前景。微型仿生扑翼飞行机器人在此基础上还具有尺寸小、重量轻、隐蔽性好等特点,在狭窄受限空间作业任务中优势更为突出。
然而,微型扑翼飞行机器人由于尺寸、负载和气动机理等限制,难以直接应用传统飞行器的路径跟踪算法,针对微型扑翼飞行机器人的路径跟踪控制问题,北京科技大学贺威团队将在无人机领域效果出色的基于矢量场制导的路径跟踪控制策略引入微型仿生扑翼飞行机器人的领域并开展了相关研究工作。
北科大贺威团队方案设计
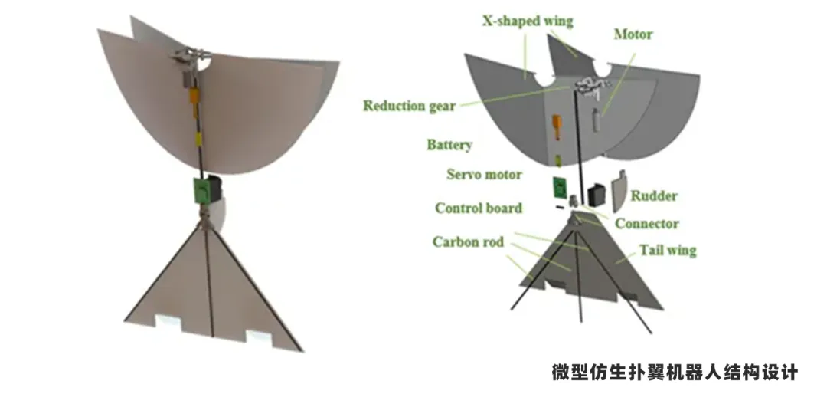
研究团队首先设计了一款翼展为27厘米、重量仅为18克的微型仿生扑翼飞行机器人,能够实现在室内自由可控飞行,并具备稳定悬停能力。
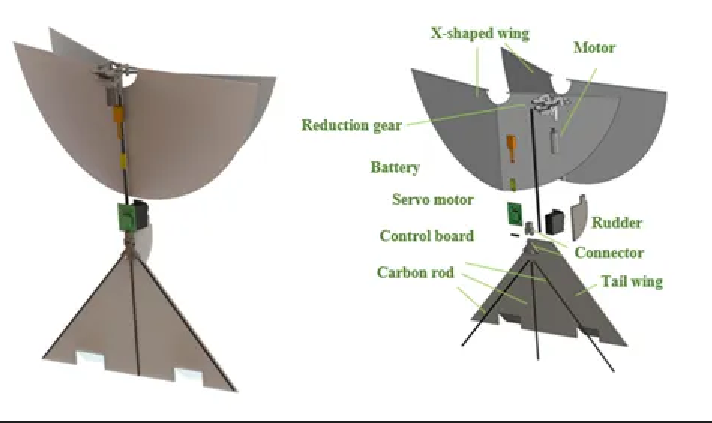
图1 团队自主研制微型仿生扑翼飞行机器人
针对微型扑翼飞行机器人的矢量场路径跟踪问题,团队建立了一个目标路径的矢量场,并设计了直线路径跟踪控制器,使飞行器在飞行过程沿着各点位的矢量场方向飞行,精确地按照目标路径飞行,从而实现对目标路径的跟踪。
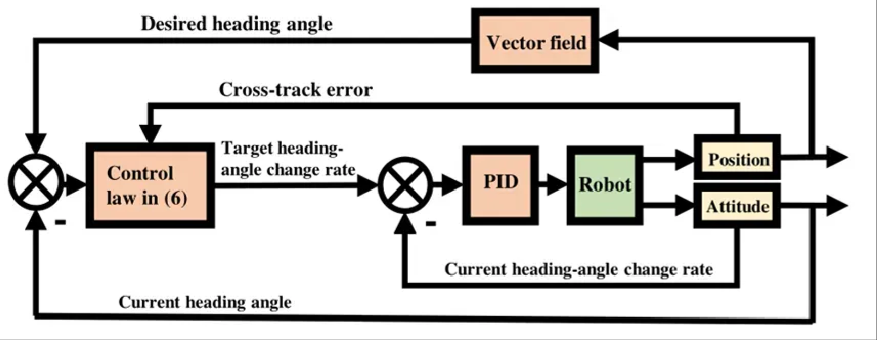
图2 直线路径跟踪控制器
算法验证实验
为了验证算法的可行性,团队进行了MATLAB仿真实验和室内飞行实验,得到了微型仿生扑翼飞行机器人的飞行轨迹以及与目标路径的横向误差的实验结果。
仿真实验结果显示,在无其他干扰的理想条件下,无论目标直线位于微型仿生扑翼飞行机器人的左侧还是右侧,都能准确跟踪目标直线。

图3 仿真实验
在室内飞行实验中,团队通过采用元客视界亚毫米级运动捕捉系统,为室内飞行的微型仿生扑翼飞行机器人提供了高精度、非接触、间接性的实时位姿信息采集,随后通过上位机处理数据,并通过ZigBee模块将控制信号传输给微型仿生扑翼飞行机器人,控制其飞行。
实验结果表明,无论目标直线位于微型仿生扑翼飞行机器人的左侧还是右侧,经过一段时间的飞行后,与目标路径的横向误差都能够稳定在20cm范围以内,成功实现对目标直线路径的跟踪。
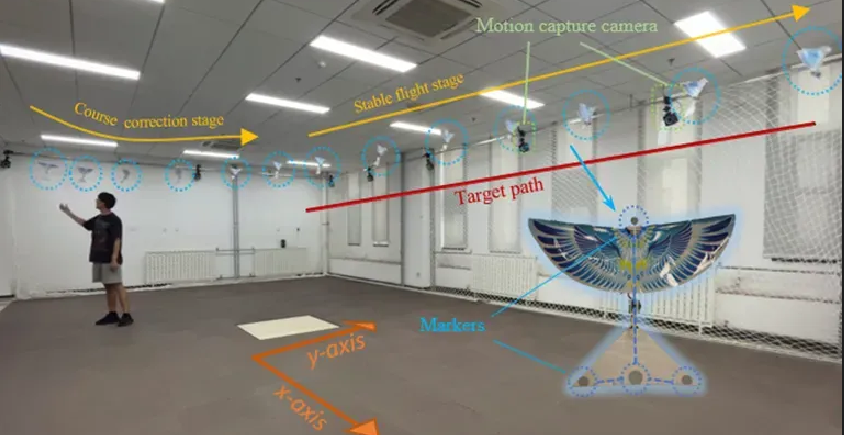
图4 室内飞行实验
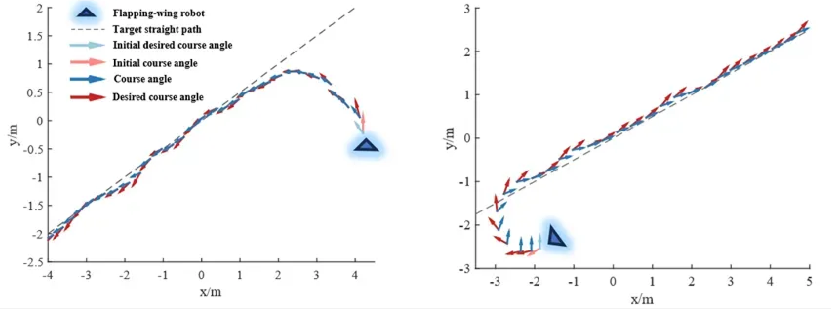
图5 微型仿生扑翼飞行机器人飞行路径
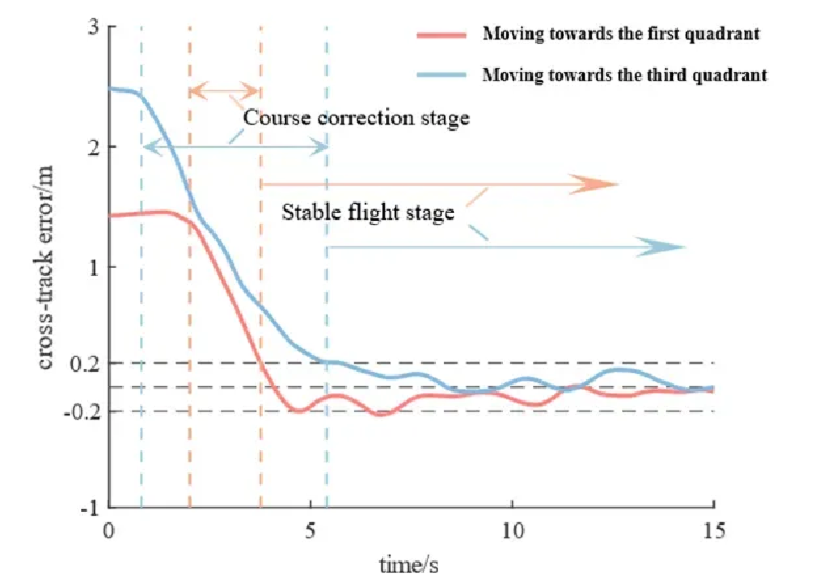
图6 横向误差
关于「元客视界」
元客视界是凌云光设立的全资子公司,主要面向元宇宙虚拟现实、Web3.0时代数字人、沉浸媒体、全息通信、计算光学成像等应用,已形成光场建模、运动捕捉、全景成像、XR 拍摄等在内的产品布局。
FZMotion光学运动捕捉系统是元客视界自主开发的运动捕捉采集与分析系统,可以实时跟踪测量并记录三维空间内点的轨迹、刚体的运动姿态以及人体动作,空间定位精度可以达到亚毫米级。

FZMotion动捕系统在无人机室内定位、仿生机器人运动规划、机械臂示教学习、气浮台位姿验证、水下运动捕捉等领域得到广泛应用,目前已经与清华大学、中国科学技术大学、北京航空航天大学、北京理工大学、哈尔滨工业大学等高校开展合作。凌云光·元客视界致力于为高校提供完备的解决方案,助力科研发展。
参考文献:
Huang, H., Liu, Y., Niu, T.et al.Vector field path following for a micro flapping-wing robot.Sci. China Inf. Sci.67, 164201 (2024). https://doi.org/10.1007/s11432-023-4027-x
(免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。 )




















