
人形机器人快速进化 , 电机是其重要部件

随着工业机器人相关技术的日趋成熟,人们对机器人技术智能化本质的认识日益加深,与工业机器人相对固定的作业环境不同,人形机器人通常使用于人类的日常生活环境中。人形机器人具备类似人类的感知、 决策、行为以及拟人化的移动特性,从外观上更加容易被使用者接受并产生亲切感, 因此能够在人类所在的环境中与人类和谐相处,协助人类完成复杂和多样的工作。机器人关节驱动器是双足人形机器人关键部件,按动力来源可以分为液压、气动、 电机驱动、记忆金属、生物类(心肌细胞)等,其中电机驱动和液压驱动是较为常见的两种形式, 电机方案的优势在于,在运动控制方面,其设计比液压控制有更成熟的解决方案,处理器编码器也相对更容易正确获取运动状态的实时反馈,控制精度也有很大保障 ,而且相较液压成本便宜了很多。

机器人运动的“ 心脏 ” ,对运动精度起决定作用
电机(俗称 “ 马达 ” )是指依据电磁感应定律实现电能转换或传递的一种电磁装置,它的主要作用是产生驱动转矩,作为用电器或各种机械的动力源。机器人关节系统包括驱动器、控制器和关节电机。机器人关节电机具有减速、 传动、提升扭矩功能,它被视为机器人的执行单元,根据需要被安装在各关节上控制关节运动,机器人诸如行走、 跑、弹跳等动作均由机器人关节电机驱动产生,是机器人运动的 “ 心脏 ” 。Optimus 主体部分共有 28 个执行器,线性及旋转各 14 个,所用电机为无框力矩电机。28 个执行器分布于肩、肘、腕、躯干、髋、膝、踝等部位。根据 2022 特斯拉 AI day 的展示,28 个执行器分布在: ①肩部 6 个(旋转×6) ; ②肘部 2 个(直线×2); ③腕部 6 个(旋转× 2+直线×4) ;④躯干 2 个(旋转×2);⑤髋部 6 个(旋转×4+直线×2);⑥ 膝部 2 个(直线×2); ⑦踝部 4 个(直线×4)。Optimus 手部共有 12个执行器(双手) ,所用电机为空心杯电机。

产业化进程加速 , 电机有望迎来广阔空间
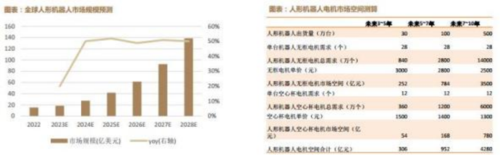
人形机器人作为通用机器人的代表和具身智能的优秀载体,一方面正在受益于通用人工智能的发展,另一方面,也以“ 具身智能 ”成为 AI 与物理世界的接口,和下一代通用人工智能的终端平台。AI 大模型在机器人任务中主要扮演 了推理决策的角色,将人类给出的自然语言指令拆解为机器人可执行的步骤。 多模态的 AI 大模型补全了机器人核心的推理决策能力,有望助力人形机器人走向通用之路。核心零部件供给是未来机器人产业规模化发展的重要支撑,人形机器人三大核心零部件包括减速器、伺服系统和控制器,成本合计占比超 70%。目前在 Optimus 人形机器人核心零部件中, 电机价值量合计占比约 25% 。假设未来 10 年全球人形机器人出货量达到 500 万台,无框电机单价 2500 元、空心杯电机单价 1300 元,则 10 年后人形机器人带来的无框电机增量市场有望为3500 亿元, 空心杯电机增量市场有望为 780 亿元,合计 4280 亿元市场空间。
相关公司
步科股份:专注于工业自动化设备控制核心部件与工业物联网/互联网软硬件,产品下游应用广泛。上海步科自动化股份有限公司一直专注于工业自动化设备控制核心部件与工业物联网/互联网软硬件的研发、生产、销售以及相关技术服务 , 并为客户提供设备自动化控制、数字化工厂及工业互联网解决方案, 是中国为数不多的机器自动化与工厂智能化解决方案供应商。公司的自动化设备控制核心部件主要包括工业人机界面、伺服系统、步进系统、可编程逻辑控制器、变频器等,且广泛应用于物流设备、机器人、包装设备、食品设备、服装设备、医疗设备、环保设备,轨道交通设备等自动化设备行业。
鸣志电器:优势主业稳健成长,新兴领域布局成效显著。鸣志电器成立于 1994 年, 由设备状态管理系统业务起家,逐步延伸至步进电机领域, 目前已成为全球步进电机排名前三企业;而后通过内生+外延方式,形成步进电机、无刷电机、伺服电机、 空心杯电机、驱动器、控制器等多产品矩阵的发展模式。22年公司持续优化自身产品结构,在信息化、自动化、智能化应用领域打造具备核心竞争力的产品。公司布局新兴、高附加值应用领域业务取得显著成效包括工业自动化、医疗器械和生化分析、移动服务机器人、光伏/锂电/半导体、 智能汽车电子。
参考资料:20231116-德邦证券-人形机器人深度系列报告:机器人运动的 “ 心脏 ”, 电机有望迎来广阔空间
免责声明:以上信息出自汇阳研究部,内容不做具体操作指导,客户亦不应将其作为投资决策的唯一参考因素。据此买入,责任自负,股市有风险,投资需谨慎。
(免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。 )




















