
SLAM
SLAM (Simultaneous Localization And Mapping),即同步定位与地图构建,原理是使用相机、激光雷达、惯性测量单元等传感器,来收集环境信息,然后用算法将这些信息融合起来,以确定机器人在未知环境中的位置,并构建一张环境地图。
SLAM是实现机器人自主导航和后续交互的关键技术之一
在畅谈机器人技术之前,小岚想先跟大家聊聊,做好机器人的第一步:自主定位导航技术尤其重要。同时,作为自主定位导航技术的重要突破口,SLAM技术的好坏,直接影响机器人在环境中的建图、定位和后续的运动能力。
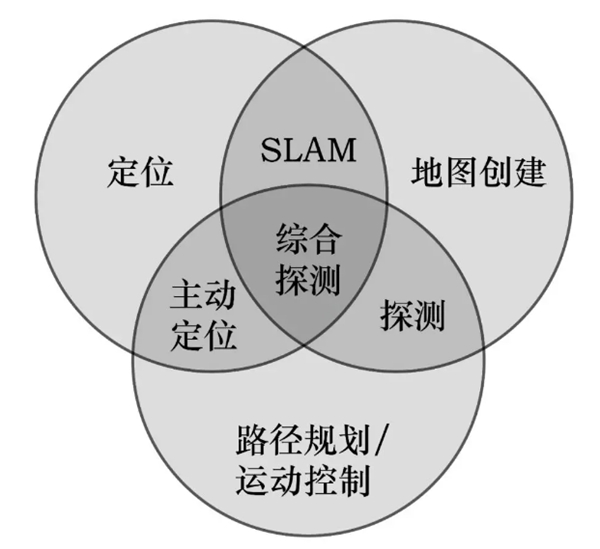
SLAM与各领域关系图
在这里,我们要明确一个道理,SLAM≠自主移动导航,不解决行动问题。SLAM只解决实时定位与地图构建的问题。就跟人出行需要地图参考一样,机器人也如此。所以,不管是什么类型的机器人,第一步,就是要先做好SLAM。
1、机器人路径规划时需要地图作为参考;
2、定位时,为消除里程计的累加误差造成的干扰做参考;
但在实际商用SLAM的过程中,会遇到各种各样的问题,那么,一个优秀的SLAM该怎么去打破重重壁垒,实现灵活应用呢?
SLAM难点
大场景建图难
机器人开展行动的第一步就需要地图的帮助,实际场景应用中,机器人会遇到几百、几万,甚至几十万㎡的工作场景,这时候来看,大地图场景构建确实是一个“拦路虎”。
1、 大场景建图费时费力,效率低;
2、 相似场景特征点少,难以形成有效的全局匹配参考 ;
3、 大场景建图难以闭环;

由于环境场景大且多为长直走廊,导致SLAM建图出现环路闭合失败
为了解决上述这一难题,思岚科技优化了软件算法、强化了建图引擎,给了行业一个较为满意和稳定的解决方案—— SLAM3.0
相比较粒子滤波每次直接将传感器数据更新进入栅格地图进行增量式构建的做法,基于图优化的SLAM3.0 摒弃固定的栅格地图,能实现超大场景地图构建,同时拥有主动式回环闭合纠正能力,让地图有个很好的闭环的过程,成为目前行业中最受欢迎的建图方式。

SLAM难点
建图细节不平整,有毛刺
目前,市面上利用开源或者自主优化的SLAM算法建出来的地图通常会存在建图细节不平整,边角有毛刺,有噪点干扰。因此,在实际投入使用的时候,无法为机器人提供良好的定位和导航能力,产品的落地应用速度和效率也会大打折扣。
传统SLAM建图
为了解决这一难题,基于思岚的SharpEdge™精细化构图技术构建高精度、厘米级别地图,超高分辨率。同时,构建的地图规则、精细,进一步提升了定位的精确性。无需二次优化修饰,直接满足用户预期。
SharpEdge™技术构建的地图效果,可让机器人直接使用
SLAM难点
环境变化后,机器人无所适从
除了建图闭环问题之外,机器人的定位问题也非常重要。因为定位一旦偏了,那后续的导航也就歇菜了。
机器人应用场景的环境变化无非包含以下几种:
1、环境结构性不强:长直走廊
2、环境易变:现场随时变
3、动态障碍物多:人群不断移动
4、光照影响:黑色物体、灯光、玻璃等
针对以上这些常见的可能会让机器人发生“定位偏”的这些问题,单靠单一的传感器肯定解决不了所有问题,现在常见的解决方案有依靠多传感器融合,激光+Vslam等多种方式融合,即使环境变化高达50%,机器人也能灵活应对,长时间工作,不需要重复多次建图。
SLAM难点
算力负担重
SLAM 算法本身是一个对于外部系统有着诸多依赖的算法,这是一个切实的工程问题,所以运算消耗是巨大的。虽然并没有达到像训练神经网络动用服务器集群那种地步,但传统上需要PC级别的处理器。但是对于很多机器人,比如扫地机是不可能装一个PC级别的处理器进去的,因此,为了让 SLAM 能在这类设备里运行,除了解决激光雷达成本外,还要对 SLAM 算法做出很好的优化。
另外提一嘴,现在很多的优化都是牺牲了SLAM的性能做出的,为了寻求在够用和成本之间做了妥协,但面对现实复杂环境时,这种优化可能会出现问题。为了更好地应对复杂环境,还需要对算法本身做出优化。
目前,SLAM 的开源实现代表多为学术界,实际应用有很多“坑”要处理,需要传感器、系统参数、其他辅助设备的联合调优。基于过去10年的技术和产品积累,思岚科技在过去陆续推出SLAMWARE Core、SLAM Cube甚至机器人底盘开发产品来为机器人解决SLAM和运动控制的问题。但是对于很多机器人开发者来说,为了让 SLAM 能在应用中运行,除了解决激光雷达成本外,还要对 SLAM 本身做出很好的优化来解决上述SLAM过程中遇到的大场景建图闭环、噪点等难题。思岚也深知这一需求,应运而生了一款产品。
至于是什么产品?
这里先狠狠卖个关子!敬请期待。
(免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。 )




















