

2023年9月19日-20日,由盖世汽车举办的第三届商用车自动驾驶大会在上海召开,本届商用车自动驾驶大会以商用车自动驾驶的商业化破局路径为核心,邀请了来自技术服务端、车企场景端的头部企业,针对关键技术进展、商业模式拓新进行探讨,为行业的发展方向提供崭新思路。作为全球领先的自动驾驶科技公司,图森未来受邀参加大会,图森未来中国CTO王乃岩发表了题为《从L2到L4:浅谈商用车自动驾驶中的规模化、可靠性与成本》的主题演讲,从如何做负责任的自动驾驶技术出发,分享了图森未来的技术探索和最新商业落地进展。
持续做负责任的自动驾驶技术,图森未来致力于打造强可靠、真无人的L4系统
作为全球领先的自动驾驶科技公司,图森未来致力于研发最先进前沿的自动驾驶技术,在实现规模化运营的同时,赋能自动驾驶商业化落地的安全性和可靠性。在演讲现场,图森未来中国CTO 强调了可靠性、安全性对L4级自动驾驶技术的重要性:“业内经常提到安全和效率之间的平衡问题,对于自动驾驶而言,安全永远是首要保障,在这样的前提下我们才可以谈效率的事情。”
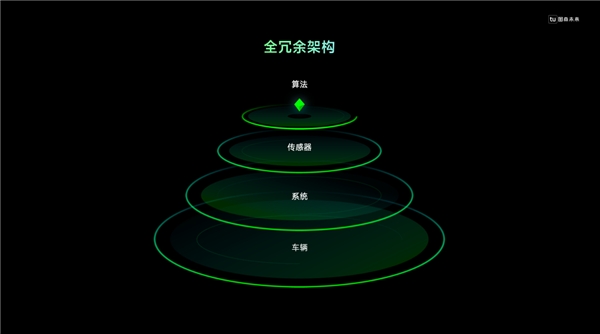
因此,图森未来要做的是负责任的自动驾驶,通过自研从车辆、系统、传感器到算法模块设计全冗余架构,打造强可靠、真无人的L4系统。
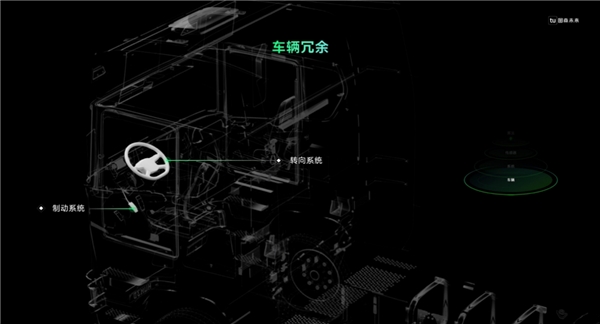
•车辆冗余:图森未来为每辆车辆配备冗余转向系统和冗余自动系统:确保在出现单路失效状况时,车辆仍然能够在其控制之下,各自独立的双系统为行车安全保驾护航。
•
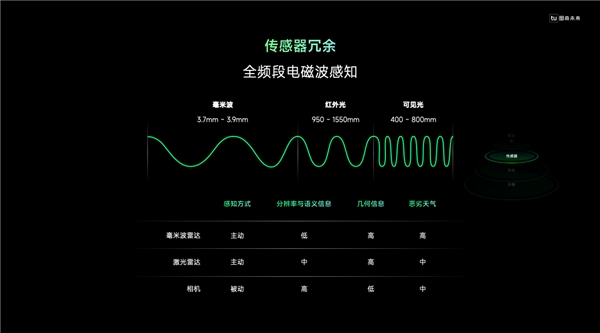
传感器冗余:图森未来使用全频段的电磁波感知,根据传感器不同的特点和不同的优劣,设计出传感器高可靠冗余的方案,可应对恶劣天气(如雨雾天气、极寒天气)的考验
•算法冗余:针对单点算法失效的问题,图森未来将整车运行的算法分成两大类,即data driven算法和Prieciple Based算法;data driven算法以大数据 + 大模型驱动,可实现对静态环境和动态环境的双重感知,包括物体识别、车辆识别、行人识别等;Principle based 算法可对问题和过程实现精准建模,实现规划、控制、传感器融合等功能。王乃岩表示,设计该套算法冗余的核心原则是“任何一个传感器都有失效的时候、没有一个算法永远不会犯错”。通过两套算法,实现双重安全保证,以确保可处理单点算法失效问题,灵活应对雨天能见度不佳、路上障碍物较多等情景。


•
感知冗余(三冗余):图森未来设计了一套完整的感知模块三冗余方案。三种感知的方法分为两大类:基于识别的物体感知和基于场景的障碍物感知。
基于识别的物体感知分为两类,一类以激光雷达为主,第二类以视觉为主。这两套方法完全独立,他们的算法对失效模式也相对独立,避免因为某些恶劣天气或者某一个单一传感器的失效导致整个感知系统都失去对物体的感知。
基于场景的障碍物感知则是基于识别的物体感知另外一个对偶的问题或者兜底方案,这套感知可以有效应对在路上遇到的通用障碍物,感知那些区域为可行驶区域。
结合这两套系统,图森未来可以实现非常可靠的远距离的性能。
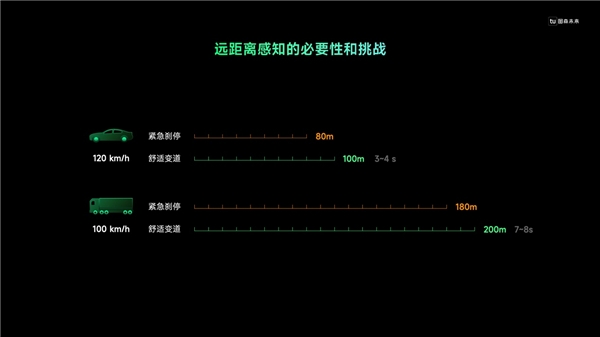
除了冗余挑战,王乃岩还强调了自动驾驶商用车运营中远距离感知的必要性。王乃岩表示,卡车相比于乘用车还面临另一个天然挑战:远距离感知。由于载重、车身长度等因素,卡车需要更长的紧急刹停距离和完整变道距离,一次完整的变道时间需要7~8秒,变道距离需要200米,这对算法性能和可靠性提出更高要求。
做高性价比的辅助驾驶,图森未来从L2到L4的商业化落地路径
图森未来不仅聚焦做负责任、高可靠性的L4自动驾驶技术,还提供软硬一体全栈式解决方案。在演讲现场,王乃岩通过介绍图森未来自研域控集中式大感知盒子TS-Box和“节油领航”智驾解决方案,阐述了图森未来从L2到L4商业化落地路径过程中,如何实现自动驾驶商用车的可靠性、规模化和成本的三重平衡。
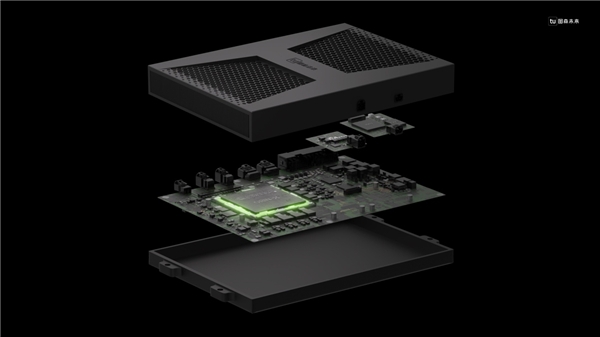
•图森未来域控集中式大感知盒子TS-Box:低成本的软硬一体一站式解决方案,兼容支持商用车和乘用车场景
图森未来域控集中式大感知盒子TS-Box整合了图森自研的自动驾驶域控制器(TDC - TuSimple Domain Controller)、集中式4D radar解决方案、集中式RTK-GNSS/INS定位模块和感知与定位融合算法,支持接入OEM客户自研的规划和控制模块(Planning & Control),实现感知方案总包、灵活度更高的自动驾驶功能开发模式。
Ts-Box主要有以下优势:
搭载英伟达大算力Orin-X SoC的高性能、车规级自动驾驶域控平台
域控集中式4D Radar方案,采用原始数据与视觉数据深度融合,大幅提升产品感知性能
集成式GNSS/IMU,自研组合导航融合算法,定位更准,成本更低,鲁棒性更高
支持接入OEM客户自研的规划和控制模块,一站式提供感知方案总包,定制灵活度更高
软硬一体双重优化,兼容支持商用车和乘用车场景
高细粒度场景技术定制能力,同时整体成本下降约25%
王乃岩表示,通过使用TS-Box,可实现感知方案总包,OEM不再用去做传感器选型、调试、集成,不用再去做数据采集、标注、训练等事情,从而更专注在规划控制算法上,定义整车产品功能,为客户减少烦恼、提高核心竞争力。
•图森未来全栈自研的智能驾驶解决方案“节油领航”系列产品:图森自研整套适用于重卡商用车的规划控制模块,打造“轻松省油,智驾无忧”驾驶体验
图森未来全栈自研的智能驾驶解决方案“节油领航”系列产品,搭载在图森自研的自动驾驶域控制器(ADC,基于英伟达Drive Orin芯片)上,并集成传感器输入、高性能中间件、车辆控制单元(VCU)和自动驾驶应用软件。该系列产品包括2个版本——节油领航和节油领航Pro,提供差异化的传感器和算力配置,满足不同应用场景的客户需求。全系列产品主打节油、安全,满足高速点到点领航,节油领航Pro版本可支持特定场景下L3级别自动驾驶。
实现基于ETA计算的节油方案,可大幅提升燃油效率
节油领航系列产品采用图森自研的自动驾驶算法,通过ETA(预计到达时间)计算实现最高效的节油方案。
高性价比、高性能的智驾方案,为商用车驾驶安全树立新标准
基于图森自研的BEV感知算法,节油领航系列产品采用高性价比传感器方案,搭载6个高清摄像头、2个角雷达,可实现高速点到点领航、主动安全等功能。
全栈自研软硬一体化解决方案
自宣布与英伟达深度合作以来,图森未来已持续投入智能驾驶解决方案的研发项目超过两年时间。经过多轮的软硬件系统迭代和实际道路测试的用户反馈,图森自研的智能驾驶解决方案从集成度、性能、成本、可靠性和开发速度等方面,都更加符合商用车自动驾驶场景的客户需求。王乃岩表示,目前,该方案已获得OEM量产项目定点,其核心竞争力和可大规模落地性正得到市场验证。
(免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。 )




















