
语义分割是计算机视觉领域的一个重要任务,旨在将图像中的每个像素标记为不同的语义类别。而多视图三维重建是通过多个视角的图像来重建三维场景。
据悉,微美全息(NASDAQ:WIMI)布局的基于语义分割的多视图三维重建算法结合了语义分割和三维重建这两个任务,旨在实现更准确、更语义化的三维重建结果。在传统的多视图三维重建算法中,通常只考虑图像的几何信息,通过从多个视图中提取特征点或匹配特征来重建三维场景,而忽略了语义信息的利用,导致重建结果缺乏对场景语义的理解和解释。随着深度学习的快速发展,语义分割技术逐渐成为计算机视觉领域的热门研究方向。语义分割技术可以将图像中的每个像素分配到不同的语义类别,从而实现对图像中物体的精确分割和语义理解。WIMI研究的基于语义分割的多视图三维重建技术就是将语义分割技术与三维重建方法相结合,以实现对三维场景的准确重建和语义理解。
语义信息可以提供更多的上下文和语义约束,通过将语义分割技术应用于多视图三维重建中,可以在重建过程中获得更准确的语义信息,从而提高重建结果的精度和可理解性。在实际应用中,基于语义分割的多视图三维重建技术可应用于三维场景重建,为用户提供更真实、更语义化的体验。例如,在重建建筑物时,语义分割可以将不同的区域分配到不同的类别,如墙壁、窗户、门等,从而使重建结果更加准确地反映建筑物的结构和组成。另外,基于语义分割的多视图三维重建技术还可以应用于其他领域,如自动驾驶、虚拟现实、增强现实等,以实现对场景的更精确理解和模拟。基于语义分割的多视图三维重建技术的发展具有重要的研究和应用价值。
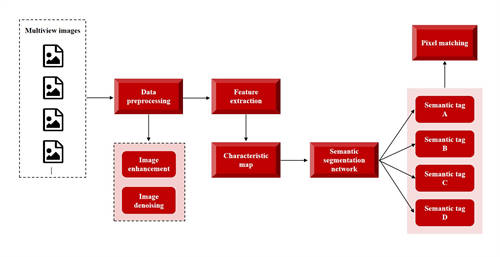
在WIMI微美全息基于语义分割的多视图三维重建算法应用的流程中,首先需对输入的多视图图像进行预处理和特征提取,预处理主要包括图像去噪、图像增强等操作,再对每个图像进行特征点提取,得到特征图。然后使用语义分割网络对特征图进行语义分割,得到每个像素的语义标签。接着,根据语义标签,在不同视图中寻找匹配的像素,并建立特征点之间的对应关系。根据像素匹配的结果,使用三角化算法重建三维点云。最后,对重建得到的三维点云进行优化,包括去除离群点、填补缺失的区域等操作,最终得到三维重建结果。该算法可以在多视图场景下实现准确的三维重建,并且通过语义分割可以提供更加丰富的场景信息,提高重建的精度和鲁棒性。
相比于传统的三维重建算法,基于语义分割的多视图三维重建算法可以更高效地进行图像处理和计算。通过利用语义信息,算法可以减少不必要的计算和处理,从而提高算法的运行速度。此外,语义分割还可以帮助算法更好地利用并行计算的能力,进一步提升算法的效率。
通过使用语义分割技术,算法还可以更好地理解图像中的物体边界和结构信息,从而提高三维重建的准确性。通过将每个像素分配到其对应的语义类别,算法可以更好地区分不同物体之间的边界,并且能够更好地还原物体的细节。另外,语义分割技术还可帮助算法更好地处理图像中的噪声和遮挡问题。通过将图像分割为语义区域,可以更好地识别和处理遮挡物体,从而提高重建的鲁棒性。此外,语义分割还可以帮助算法更好地处理光照变化和图像质量不佳的情况。
WIMI微美全息布局的基于语义分割的多视图三维重建算法在准确性、鲁棒性和效率方面都具有明显的优势。这些优势使得该算法在实际应用中能够更好地还原真实世界的三维场景,并且能够更好地应对现实世界中的各种复杂情况。
目前深度学习在语义分割和三维重建领域取得了显著的成果。未来WIMI微美全息将探索如何将深度学习方法与传统的几何计算方法相结合,充分利用两者的优势,提高基于语义分割的多视图三维重建算法的性能和效果。
(免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。 )




















