
一篇最佳论文,一篇最佳论文候选,共计54篇论文被接收,商汤科技及联合实验室交出CVPR 2023闪亮的成绩单。
6月18日-22日,全球计算机视觉盛会CVPR 2023(Computer Vision and Pattern Recognition)在加拿大温哥华举行。本届CVPR论文投稿总量达9155篇,最终共有2369篇论文被接收。最佳论文候选为12篇,接收率仅为0.13%。
商汤两篇论文登上最佳论文候选名单(Award Candidate),其中自动驾驶研究论文《Planning-oriented Autonomous Driving》(以路径规划为导向的自动驾驶)斩获本届CVPR最佳论文奖(Best Paper Award)。
这是CVPR历史上第一篇以自动驾驶为主题的最佳论文,该论文首次提出感知决策一体化的自动驾驶通用大模型UniAD,开创了以全局任务为目标的自动驾驶大模型架构先河, 标志着自动驾驶技术的重要突破, 为自动驾驶技术与产业的发展提出了新的方向。
CVPR 2023最佳论文,自动驾驶研究获重要突破
自动驾驶技术高度复杂,需要融合多学科领域的知识和技能,包括传感器技术、机器学习、路径规划等方面。自动驾驶还需要适应不同的道路规则和交通文化,与车辆和行人进行良好交互,以实现高度可靠和安全的自动驾驶系统。大部分自动驾驶相关的工作都聚焦在具体的某个模块,缺少能够实现端到端联合优化的通用网络模型。
论文提出的自动驾驶通用算法框架——Unified Autonomous Driving(UniAD)首次将检测、跟踪、建图、轨迹预测,占据栅格预测以及规划整合到一个基于Transformer 的端到端网络框架下,更高效契合了“多任务”和“高性能”的特点,取得自动驾驶技术研究重要突破。
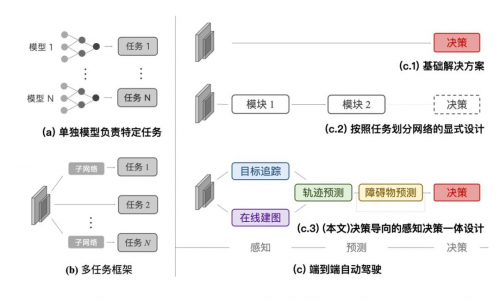
自动驾驶UniAD框架对比(a)模块化(b)多任务模块(c)端到端自动驾驶模块
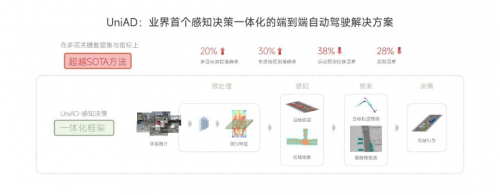
商汤科技联合创始人、首席科学家、绝影智能汽车事业群总裁王晓刚表示,UniAD是业内首个感知决策一体化的端到端自动驾驶解决方案,并且整体系统和性能取得大幅提升,代表了未来自动驾驶技术的发展趋势。
这种端到端的优化在多项关键技术指标上超越了SOTA。比如,多目标跟踪准确率超越SOTA 20%,车道线预测准确率提升30%,预测运动位移误差降低38%,规划误差降低28%。
UniAD 是一项极具创新性的自动驾驶技术,且因其具有很大的潜力和应用价值,目前在学术界和工业界都引起了广泛兴趣和关注。
随着通用人工智能(AGI)引领的二次革命的到来,以此为基础,期待在未来能推动实现更高阶的自动驾驶人工智能。
CVPR 2023最佳论文候选,加速推动AIGC时代真实感3D内容生成
面向真实 3D 物体的感知、理解、重建与生成是计算机视觉领域一直倍受关注的问题。由于缺乏大规模的真实扫描三维数据库,最近在三维物体建模方面的进展大多依赖于合成数据集。
为促进现实世界中3D感知、重建和生成的发展,论文《OmniObject3D: Large-Vocabulary 3D Object Dataset for Realistic Perception, Reconstruction and Generation》提出了OmniObject3D,一个具有大规模高质量真实扫描3D物体的大型词汇3D物体数据集,覆盖近200个类别、约6000个三维物体数据,包括高精表面网格、点云、多视角渲染图像和实景采集的视频,借助专业扫描设备保证了物体数据的精细形状和真实纹理。

OmniObject3D是目前学界最大的真实世界三维扫描模型数据集,为未来三维视觉研究提供了广阔空间。
利用该数据集,研究人员精心探讨了点云识别、神经渲染、表面重建、三维生成等多种学术任务的鲁棒性和泛化性,验证其从感知、重建、到生成领域的开放应用前景,有望在AIGC 时代推动真实感3D生成方面发挥至关重要的作用。持续引领前沿创新,是商汤在以大装置SenseCore和大模型为核心的AI基础设施领域长期投入,并坚持产学研协同创新的成果。
王晓刚教授认为,在大算力、大数据的支撑下,大模型将以更强大的通用能力引发人工智能领域的巨大变革,同时也会拓展我们的研究视野,激发新一轮研究范式革新。
自今年4月初“商汤日日新SenseNova”大模型体系公布以来,商汤的大模型已在气象预报、遥感解译、开放环境中的决策问题等领域取得了诸多突破性成就。未来,商汤将继续与产学研各界共同拥抱和探索大模型带来的范式革新,为AI的前沿探索开拓新方向和新路径。
(免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。 )




















