
上篇,我从测距半径、采样频率、角分辨率、防护能力等角度介绍了如何看激光雷达的核心参数指标。但是随着雷达在细分市场的应用越来越多,遇到的实际使用问题也会越来越多。

上图是一个很普通,很常见的办公场景,但是对于激光雷达来说,却有很多坑要避,有很多本领要展示。
上述办公场景有这样几个环境特征:
1、黑色桌腿,黑色门框,黑色踢脚线
2、 瓷砖地面,光滑反光
3、 透明玻璃,激光信号可能会打穿
……
那今天我们就借助这个场景,了解一下激光雷达除了要看基本的参数指标外,该如何从这些参数中发掘冰山下的一角,确保雷达的稳定性和实用性。
1.黑色物体/细小物体检出率
由于白色和黑色漫反射率不同,所以雷达在检测黑白物体的能力上也有所不同。目前激光雷达主要应用在商场、餐厅、办公楼……,这些场景里难免会出现身着深色裤子、黑色鞋子的人,出现黑色椅凳,如果检出能力不强大,会出现黑白分层,甚至检测不出的情况,所以激光雷达对黑色物体/细小物体的检出就显得尤为重要。

▲S2测量黑白物体不分层
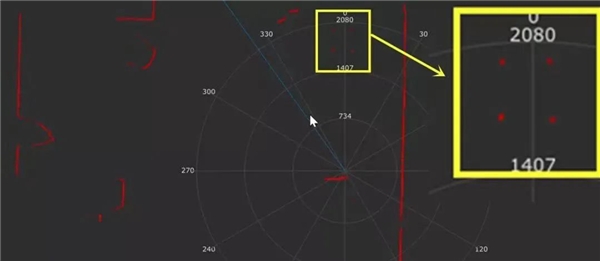
▲S2细小物体检出效果(椅子腿)
2.透明/磨砂玻璃/高反射物体检出率
除了深色物体外,激光雷达还会遇到透明玻璃、高反射的瓷砖、镜面等环境,如果雷达检测能力不强,就会造成漏检、错检,对机器人后续建图导航造成一定影响,比如:边角毛刺多、丢点、地图重合……
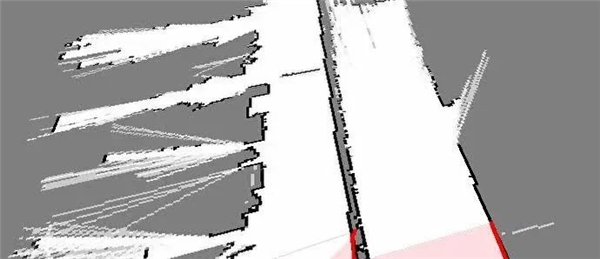
▲ 地图毛刺多
思岚的激光雷达在算法和光学上下了狠功夫,对透明玻璃、高反射物体带来的噪点可以进行滤波,测距表现不俗。
3.抗环境光干扰能力
激光雷达在应用的过程中会遇到两种光源,一种是自然光源(如阳光),还有一种是人造光源(如灯光)。

其实,不管是自然光源还是人造光源,都会在雷达扫描建图的过程中产生噪点,影响超声波等传感器的误触发,继而影响整个机器人的导航效率。同时,也可能导致雷达的有效测量距离变短或者完全无法进行距离测量。
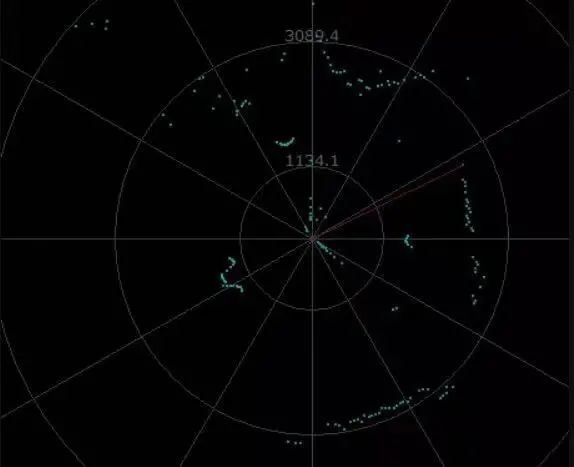
▲ 环境光对激光雷达造成的噪点
所以,雷达的抗环境光能力显得尤为重要。为了应对光源因素带来的干扰,思岚科技在处理雷达算法以及光学调教上没少下功夫,采用独有的算法+传感器技术,对射灯、指示灯、金属等光源产生的噪点进行过滤,大大降低噪点带来的导航干扰。

可点击查看大图
4.外观尺寸
激光雷达目前在机器人、智能家居、轻量级无人驾驶等多领域得到应用,激光雷达作为其中的载体部分,对尺寸和重量有一定的要求,在外观上越薄越好,在性能上,集成度越高越好 。
思岚的激光雷达采用定制特殊部件,内部机械系统也是精心设计,在极限压缩体积的情况下,依旧能保证优越性能。
A系列雷达产品厚度均在4 厘米左右,适合于各类服务机器人。S系列雷达更是实现了超薄外观的又一极限提升,小巧轻薄 ,贴合机器人整体外观设计,不影响机器人的科技感和线条感。

▲ RPLIDAR 尺寸小巧紧凑,贴合机器人设计
5.兼容性
除了一些参数外,其实雷达的兼容性也很重要。历经数代产品的更新,RPLIDAR保持了良好的兼容性。
在SDK方面,即使是最早发布的RPLIDAR A1都可以被任意思岚发布的SDK所兼容。
在接口方面,S2的接口与A系列雷达接口一致,高度集成,完美兼容。

▲ S2与A系列接口一致
以上,就是挑选一款雷达要着重注意的一些指标,其实说了这么多,还是要以实用性和可靠性作为第一准则,这样才能在商用/工业应用领域适配更多细分需求。
(免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。 )




















