
随着特斯拉人形机器人擎天柱Optimus原型机的发布,人形机器人的讨论掀起了又一轮高潮。外行看热闹,内行看门道,这场发布会上除了Optimus量产价格将低于2万美元,能完成浇花、搬运等工作这些信息之外,对一些重要的技术实现方案也做了说明。
人体结构是相当精妙复杂的,看似简单的行走运动,除了骨骼、关节的支撑驱动之外还需要肌肉的配合。相较之下把机器人做出仿生外形也许容易些,但是想要像人类一样灵活的行走、弯腰和转动则非常难,更不用说让机器人能拥有一双灵巧的手。
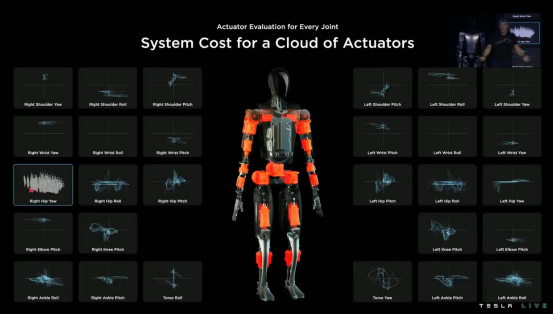
特斯拉Optimus共有28个运动关节,包括三种旋转执行器和三种线性执行器。旋转执行器主要分布于肩髋等需要大角度旋转的关节,线性执行器分布于膝肘等摆动角度不大的单自由度关节和腕踝两个双自由度但是体积紧凑的关节。其中旋转关节的分布方式和传统仿人型机器人基本一致,而线性执行器的分布却与以Asimo为代表的传统电伺服机器人差异较大。究其原因和Optimus实用化的设计理念相关,特斯拉需要的是一个结构可靠、低耗能的机器人,目标是能够充一次电工作一整天,因此高动态响应并不是核心诉求。
擎天柱腿部的线性执行器主要分布负责支撑和承力的髋关节、膝关节及踝关节,具有前后摆动自由度。采用线性执行器驱动器关节的第一个优势是空间利用率高,相比传统旋转执行器分布于关节附近,线性执行器可以纵向布局,最大限度利用腿部内部空间,布置更大更长的电机,提供更大的推动力,如会上展示的一台执行器可以吊起一台钢琴。这也与机器人进行零件搬运的工作目标相吻合。第二个优势是线性执行器的螺杆传动机构通过合理设计可以具备自锁能力,即下半身不动时可以自动锁定姿态,不耗能,形成一个低功耗且稳定的底部支架。如果采用传统抱闸制动电机方案,制动器占用额外重量且提供的制动力矩也较小。

上肢的肘关节屈伸采用线性执行器的理由和腿部原理一致,低耗能高推力,让擎天柱拥有强壮的二头肌。前臂的两个线性执行器构成并联关节主要目的是降低腕关节的尺寸。纤细的腕关节有两个好处。第一个是在抓握时降低关节与工件的干涉,提高抓握路径的灵活性。第二个是降低前臂对视觉构建及视觉位置反馈的干扰,提升控制精度。

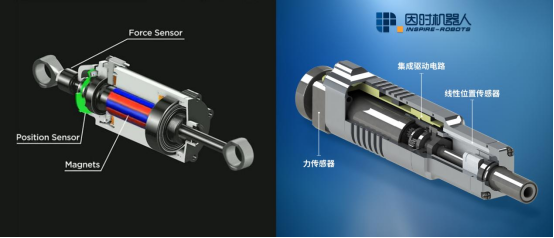
为什么线性执行器可以实现低能耗高负载?传统谐波减速旋转伺服在追求高动态响应时需要适当降低减速比提升传动机构透明度,通过马达的高峰值电流获得大扭矩,同时通过电流环近似计算出关节的受力状态,高性能势必带来高能耗。而线性执行的特点是传动透明度低,但等效减速比很大,能够实现大推力的同时还具有自锁特性(只要合理设计螺杆传动机构即可)。特斯拉在线性执行器上集成力传感器直接检测螺杆负载,以此来弥补传动透明度低的不足。因时机器人很早就发现了这个方案的优势,通过集成微型力传感器及力闭环的阻抗和导纳控制算法让线性执行器兼具自锁节能与精确力控。
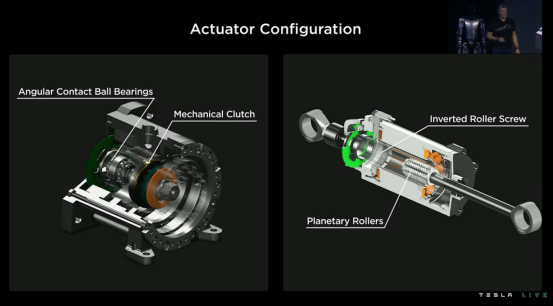
发布会中的推杆采用了反向行星滚柱丝杠技术,反向的意思为螺母旋转,螺杆不动。剖面图可以看到伺服电机转子直接带动螺母旋转。该方案特点是行星滚子与螺母多点咬合滚动配合,承载能力极强,寿命超长,比常规滚柱丝杠提升一个数量级。但难点是滚子及螺母磨制工艺复杂耗时,装配时需要匹配不同滚子的相位,操作难度大,因此成本很高。但通过特殊的设计和工艺,其实是可以在保证性能的前提下将成本降低。因时机器人通过多年的研究已经将该技术应用于微型伺服电缸,突破了螺母直径10mm以下的滚柱丝杠的量产技术。该技术有望成为与常规谐波减速方案关节相互补充的主流技术方案,价格下降后在工业自动化领域的潜力也十分巨大。
当然,特斯拉的这款线性执行器也不是全无劣势。从图片结构看,Optimus所使用的直线伺服电缸为半闭环系统,即驱动器只控制伺服电机及螺母的位置,而最终的推杆末端位置精度通过丝杠来保证。这给末端控制精度的稳定性埋下了隐患,随着工作时间延长丝杠会产生磨损,末端精度和背隙也将发生变化。为了克服这一问题,建议在线性执行器的末端增加绝对位置传感器形成全闭环,通过算法补偿丝杠磨损带来的变化,可以在全生命周期中都保持高精度。因时机器人的微型伺服电缸就是通过末端位置反馈方案解决精度变化问题的。
很多人把擎天柱与波士顿动力的阿特拉斯相比,吐槽其行动迟缓。这和擎天柱低功耗高可靠性和低成本的设计理念有关,阿特拉斯性能虽好但可靠性较差,容易漏液倒地,液压系统中的伺服阀价格也很高,所以电伺服还是现阶段很有推广潜力的方案。
诚然从瞬时功率密度的角度看,现有的电伺服系统的功率密度还远低于液压伺服系统,无法支持奔跑与空翻。但从物理原理的角度看电伺服还有很大的提升空间,如提升马达转速可以增加单位时间内电磁能量转换的次数。比如高速吸尘器中10万转的马达,虽然体积只有几十克,但可以持续输出100瓦以上的功率,而同样输出功率的工业低速伺服马达重量多在1000克以上。因此高转速马达加大减速比减速机构的方案有望进一步提升电伺服功率密度,因时机器人一直认为高动态性能的电伺服仿人机器人未来可期。因时机器人发明的一种特殊行星螺母方案可以实现0.3mm以下的螺距,常规同体积螺母螺距不小于1mm。这相当于提升了3倍以上的减速比,更适合高速电机的参数匹配,是微型伺服电缸高功率密度的法宝之一。
在发布会上另一个让人惊艳的硬件就是擎天柱的五指灵巧手了。灵巧手作为机器人实现操作的终端工具,十分重要且复杂,设计面临的最大难题是空间极小而驱动自由度极多。人手(不含腕关节2个自由度及4个被动自由度)共有21个主动自由度,如果将21个执行器完全布置于掌内,现有技术根本无法实现。当下解决这个难题有两个方向:一种是采用欠驱动方式,牺牲一定灵活性减少电机数量。另一种是将电机布置转移至前臂,采用拉线方式从远端控制灵巧手的关节,如英国的shadow手,但这个方案的缺陷是拉线机构随着使用,精度会逐渐变化,机构复杂易损坏,因此尚不具备实用性。
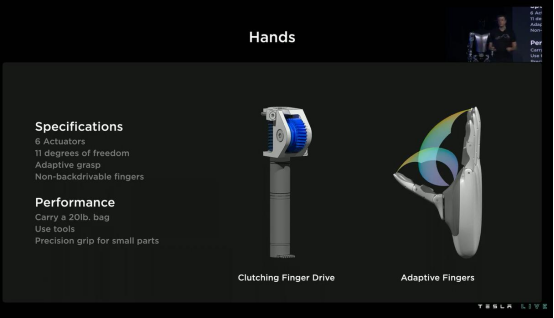
特斯拉机器人灵巧手采取了折中的方案,使用较为经典的六电机驱动方式,拇指采用双电机驱动弯曲和侧摆,其它四指各用一个电机带动。电机采用蜗杆传动机构的目的与腿部直线伺服如出一辙,采用机构自锁降低能耗。为追求形态美观及自适应性,手指采用拉线的传动机构,但由于线驱动可靠性和精度的隐患,预测后期该结构会进行改进,估计也是紧迫开发周期下的权宜之计。因时机器人仿人五指灵巧手也是从实用性的设计理念出发,同样的6电机驱动,不过灵巧手采用了刚性连杆结构,通过内置力传感器,使得灵巧手兼具可靠性和控制柔性。

在因时机器人看来,特斯拉发布的擎天柱原型机再一次印证了一个趋势,那就是机器人核心零部件今后的发展方向势必是向小体积、大功率密度、低成本和可量产去靠拢的。毕竟特斯拉想要造出来的只是一台能够代替人类完成一些简单重复工作的机器人,而不是一个真正的“钢铁侠”。考虑到核心零部件的功耗、成本以及空间比等因素,选择电驱执行器也就顺理成章了。微型伺服电缸作为因时机器人研发出来的一种微小型电驱执行器,不仅被我们用作机器人的运动执行部件,在需要高精度的生物医疗领域,亦或在3C自动化、新能源等领域也有广泛的应用空间。
也许特斯拉optimums没有实现大众的幻想,但是人形机器人除了自身的商业价值之外,更多的是代表了最先进的技术,而这些技术将会在机器人领域之外大放异彩,改变我们当下的生产方式甚至是生活方式。未来已来,你准备好了吗?
(免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。 )




















