
作者:
u-blox 定位产品中心高级首席工程师 David Bartlett
u-blox汽车应用市场部负责人 Stefania Sesia 博士

自动驾驶汽车已成为当今主流媒体的热议话题,但若要将无人驾驶车辆作为主流大众出行工具,我们还有一些关键技术需要完善。
高精度定位就是其中一个需要重点关注的领域。为了成功制造出符合汽车工程师学会六级自动化量表中处于较高等级的车型,高精度定位技术需要随时通过可靠的方式实现精确到厘米级的定位。
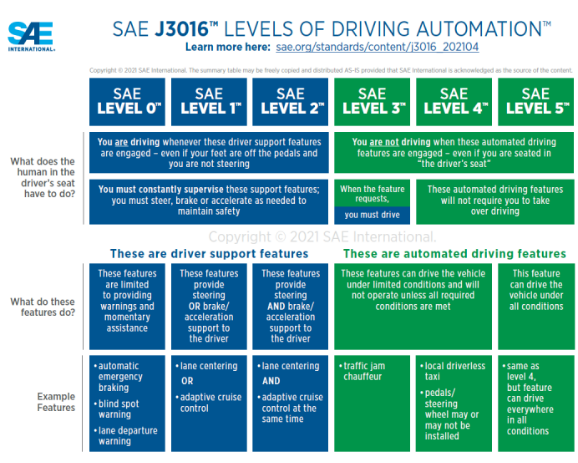
© SAE International
图 1:汽车工程师学会六级自动化量表
然而,大多数现代汽车的定位系统精度仍然达不到这种水平,现在的汽车往往使用全球导航卫星系统 (GNSS) 接收机,配合惯性测量单元 (IMU) 和里程计来实现定位。即便 GNSS 卫星信号保持出色的接收效果,但如果没有校正服务,其水平精度约2 米到5 米(CEP)。如果在城市或室内等更复杂的环境中,精度还会大幅劣化。
通过 UWB 和 V2X 弥补 GNSS 的短板
目前,业界正开发各种解决方案来应对 GNSS 的这一短板,但现有的各种技术都存在局限性,并没能提供在所有环境下都可行的解决方案。因此,未来自动驾驶汽车必然将依靠多技术融合的混合解决方案来实现。
迄今为止,对 GNSS 结合地面无线电技术来提高汽车定位精度方面的研究仍然相对匮乏。蜂窝通信 V2X (C-V2X)、IEEE 802.11p V2X、其后继技术 802.11bd 和超宽带 (UWB) 均适合用于短距离测距。在 EN 302890(智能交通系统)中,V2X ITS 通信技术被列为潜在定位解决方案,而超宽带 (UWB) 技术在室内应用以及车厂的免钥匙门锁等应用领域的发展势头十分迅猛。
以上技术的发展逐步成熟,可进一步探究其作为 GNSS 和 IMU补充方案的潜力,最终支持更高的车辆自主性水平。u-blox 最近进行了一项研究,评估在采用 GNSS 的混合式汽车导航解决方案中纳入 IEEE 802.11p V2X 和 UWB,以对比地面无线信号测距的优劣势。我们本次测试目标主要是研究融合技术在自动驾驶应用场景中的可行性,并分析在未来自动驾驶车辆中真正采用此类混合导航解决方案时可能的研究方向。
地面无线测距的工作原理
地面无线测距系统需要建立固定地面站网络(在 V2X 系统中通常被称为路边单元 (RSU)),其中每个地面站的位置都是已知的。RSU 会回复车辆发出的 V2X 或 UWB 信号,车辆测量信号的往返时间,并据此计算出自身与RSU之间的距离。通过三个或更多相对于车辆呈现几何分布的 RSU 执行此操作,即可确定车辆位置。
模拟的必要性
此类解决方案需要大规模 RSU 部署,而目前尚不具备这种条件。对于我们的研究而言,在城市公众用地环境中安装合适的地面站网络不具备可行性,部分原因在于,有关此类环境下 UWB 的法规监管仍在不断发展完善。因此,我们在多个私有地产周边设立了锚点,涵盖的环境包括空旷区域到代表城市环境的区域(例如商业园区)。我们对 UWB 和 V2X 信号在这些环境中的表现进行了广泛的测量,从中提取噪声等性能统计数据,并据此创建了一个针对测距性能的行为仿真模型。
测试方法
在为不同类型的环境(农村、城市和室内环境)建立行为仿真模型后,我们进行了数次真实世界的路测,其中涵盖包括公路的高速路段、高密度城区、频繁起停的拥堵交通环境、带有大量弯道的环境,以及 隧道等GNSS 信号接收受限或没有信号的地方。
在驾驶过程中,我们收集了 GNSS 测量值和位置真值。在确定 GNSS 测量值时,我们使用的是内置 IMU 的u-blox NEO-M8L模块。为确认地面位置真值,我们使用了一个高精度实时动态 (RTK) 接收机、GNSS 增强数据服务和一个高规格 IMU。
我们根据环境(高密度城区、隧道、开阔乡村等)对路测数据进行分类,以便在仿真中应用适当的噪声模型。
随后根据选择的密度和分布规则分配 RSU 位置,并增加 2 米的随机高度变化,以避免纯平面部署。我们使用不同数量的 RSU 进行了测试,以便了解需要多少个 RSU 才能达到必要的定位精度水平。
随后设置额外的仿真变量,如测距时间戳的准确性。
完成所有这些工作后,我们通过仿真,生成了每个测距历元的 RSU 与真实位置之间的原始数据。之后,我们逐个样本添加噪声,并将由此得到仿真结果与实测中记录的GNSS 测量值整合。
主要结论
通过仿真,我们得以生成性能统计数据,从而方便地将混用了 GNSS+V2X 和 GNSS+UWB 的解决方案与传统 GNSS+IMU 解决方案(与当今主流车辆中所用的解决方案相似)进行对比。
图 2 展示了三种解决方案的性能:

图 2:三种导航方案的测试性能结果
总体来看,我们发现GNSS+V2X (IEEE 802.11p)系统的性能与使用标准定位的传统GNSS+IMU(DR)解决方案相似。在接收不到GNSS信号或信号强度严重下降的情况下,IMU也会失去其价值,因为IMU依靠持续不间断的GNSS信号接收来保持校准。在这里,基于V2X的定位解决方案对于导航是有价值的。但为了达到自动驾驶所要求的精度和完整性水平,我们还需要开展进一步工作,包括研究IMU在高完整性、高精度定位中的作用。图 2:三种导航方案的测试性能结果
GNSS+UWB 混合系统的性能要明显高于其他方案,接近使用基于 RTK 的 GNSS 增强服务所能达到的水平。我们的测试系统使用 0.67 Hz 的定位更新率,精度可接近 10 厘米,但我们期望未来生产级系统能达到 V2X 中广泛使用的、更常见的 10 Hz 定位更新率。
将 10 Hz 的 UWB 测距系统与使用校正数据的高精度 GNSS 系统结合使用,应可在大多数情况下达到 10 厘米级别的精度。事实已经证明,使用校正数据的 GNSS 能在开放区域和高速公路上实现这种精度水平。通过在城市环境中部署 RSU 网络,UWB 即可在难以接收卫星信号的情况下作为高精度 GNSS方案的补充。
但 UWB 的范围有限,再考虑到目前与户外使用相关的监管限制,其目前实用性有限。有鉴于此,这项技术可能比较适合室内区域微导航,比如停车场导航。
其他经验启示
这项研究带来了其他一些重要经验启示。首先,在混合方案中除 GNSS 之外,即使只部署两个 RSU,也有明显的优势。
第二,为保证定位系统准确测定车辆所在高度,RSU 的高度变化必不可少,尤其是在使用 V2X 技术时。为了确保车辆在有多个不同高度层级的道路上(比如多层立交桥)安全行驶,这尤为重要。
第三,我们成功建立了一个混合滤波器,处理来自 V2X、UWB 和 GNSS 系统的信号,并且无缝处理仅有 GNSS 的区域(未部署 RSU)和仅有陆地测距的区域(如隧道)之间的过渡。
第四,尽管陆地测距在这一应用领域表现出了不错的前景,但很难避开环境和多径效应的影响。即使是 UWB,有时也会受到非视距信号传播的影响。
最后,GNSS 与陆地测距之间的精确时间校准也是一个关键因素。我们最初预计校准到数毫秒便足以满足需求,但在实际中,我们发现有必要达到 100 微秒以下。
后续举措
这项研究展示了使用短程通信测距技术补充当今车辆部署的定位技术和服务的潜力。尽管如此,要通过这项技术真正推动未来自主车辆发展,还需要满足更多前提条件,尤其是在监管方面。例如,需要为此应用获得在户外使用 UWB 的许可,并且需要广泛部署具有 UWB 功能的 RSU。此外,在部署任何类型的 RSU 时,都需要考虑到 RSU 可能会用作定位锚点,而不仅仅是通信设备。还需要为 V2X 分配更多的无线频谱和更宽的信道,并且需要将定位基元和信号纳入 V2X 标准。
一个值得进一步探究的相关领域是使用 UWB 测距来保护交通弱势群体 (VRU),如行人和骑行者。现代智能手机和汽车均采用了 UWB 技术,因此我们有机会利用这种条件,让自主车辆更好地了解其周边的 VRU 位置。
如果您想进一步了解本研究、研究方法或结论,我们很乐意与您分享。请发电子邮件至 David.Bartlett@u-blox.com 联系我们。
u-blox简介
瑞士u-blox 公司(SIX:UBXN) 是为汽车、工业和消费市场提供定位和无线通信技术的领先供应商。其解决方案能准确进行人员、车辆和机器的定位,并通过蜂窝网络和短程通信网络实现无线通信。凭借广泛及多样化的芯片、模块和日益扩大的产品支持数据服务生态系统,u-blox 公司在帮助其客户针对物联网快速而成本高效地开发创新解决方案方面具有得天独厚的优势。u-blox 公司总部设在瑞士塔尔维尔,目前在欧洲、亚洲和美国都设有办事处。(www.u-blox.com)
请关注u-blox中国区官方微信号:ublox_China
(免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。 )




















