

柔性协作机器人技术,即是在机器人的应用过程中,解决机器人与环境接触交互问题的有效解决方案。而在和人类频繁交互的应用场合,为了提高机器人使用的安全性与智能性,柔性协作机器人应运而生。
机器人大讲堂直播间057期
随着机器人向更深更广方向的发展以及机器人智能化水平的提高,机器人的应用范周在不断地扩大,近些年更是随着人力资源的短缺,在餐饮、养老和医疗康复等新兴领域对机器人应用的需求也迅速提高。而在上述需要和人类频繁交互的应用场合,为了提高机器人使用的安全性与智能性,柔性协作机器人应运而生。
柔性协作机器人是通过在机器人本体上增加丰富的力与视觉传感器,使原来示教-执行的开环执行过程,变为能够与环境动态交互的智能闭环执行过程,以达到与环境和人安全、准确交互的目的。
我们特邀珞石机器人研发中心系统工程师任赜宇博士做客机器人大讲堂直播间,为大家分享协作机械臂的设计解析及应用。
01
协作机械臂及其关节的设计
在分享关节&臂的设计之前,我们先对前面几款典型协作机械臂关节&臂的特性进行一个总结:

1、类UR关节
在UR的关节中,从左到右依次是输出法兰、谐波减速器和用于中空走线的中空套筒;UR关节一个很大的特点是将无框力矩电机的外壳与输出连杆做成了一体;再往后是无框力矩电机和高低速的双编码器,它的测量原理是把输出端的低速通过中间的传动轴传到电机的尾部,然后在电机的尾部和电机的高速端一起做高低速的位置测量,这样有较好的集成性;最后是整体关节的驱动器位于高低编码器的尾段,然后是插针式抱闸,基于此原理的抱闸会造成制动后在电机端存在一个约60°角的晃动,即使说通过一个高减速比谐波减速器,在末端仍然会有比较大的偏差。

2、KUKA-iiwa关节
KUKA-iiwa关节最左端是类似杯状的力矩传感器,因为较薄的外壁导致其成本控制相对较难,然后是输出端的编码器,不同于UR,iiwa就是将编码器置于输出端进行测量;接下来是用于径向抗弯支撑的交叉滚子轴承和谐波减速器;再接着是电机模块,其包含了无框力矩电机+电机端编码器+抱闸,集成度是非常高的,且用了紧凑型侧向读数头;紧接着是关节的功率转换板、电机控制板和电源板,最后是用于散热处理的风扇,末端是外壳连杆。

3、类Sawyer关节
Sawyer关节与UR5和库卡最大的不同是在谐波减速器后集成了一个弹性体编码器,其通过测量两个端面的偏角再乘以抗扭截面系数得到关节的力矩,其中这个偏角是通过磁环+编码器的方式获得。这种方式致使关节的整体高刚度、低成本实现、力矩高测量精度这三个性能不能兼得。

4、珞石GIA
在做协作机器人前先做关节是因为伺服关节的力控性能是协作机械臂整体力控表现的基础,从测试的结果来看,关节力控难点体现在三方面:一是对谐波减速器传动特性引起的纹波的抑制;二是因引入谐波减速器的摩擦力精确建模与补偿;三是对基于应变片的力矩传感器噪声与对称性的处理。

那么接下来是对典型协作机械臂整机设计小结:

02
协作机械臂的当前应用
经过诸多协作机器人厂商的尝试与推广,当前协作机器人的应用主要集中在工业场景、科研场景、医疗场景与商业场景等领域,针对每个场景的具体应用demo可参见如下:
工业场景

科研场景

医疗场景

商业场景

03
协作机械臂的未来发展
未来协作机器人在本体设计方面的设计发展趋势,主要还是关注紧凑化、洁净度与提高负载自重比等,总体来说,协作机器人在本体设计与控制方面,原理性的技术都已经相对成熟,当前更多的精力可能还需要聚焦于产品的定位、提高产品可靠性与降低价格等:
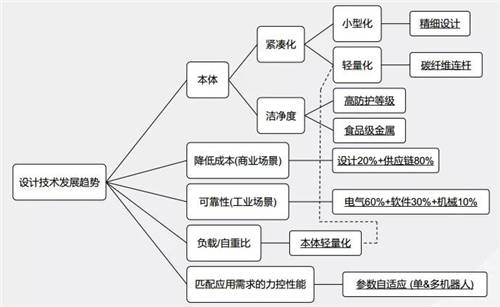
而在应用场景的发展上,协作机器人以“更轻、更安全、更好用”的底层逻辑是正确的,但量大的刚需场景仍在探索中,下图是一些可能会需要应用到协作机器人的场合,供大家参考:

(免责声明:本网站内容主要来自原创、合作伙伴供稿和第三方自媒体作者投稿,凡在本网站出现的信息,均仅供参考。本网站将尽力确保所提供信息的准确性及可靠性,但不保证有关资料的准确性及可靠性,读者在使用前请进一步核实,并对任何自主决定的行为负责。本网站对有关资料所引致的错误、不确或遗漏,概不负任何法律责任。
任何单位或个人认为本网站中的网页或链接内容可能涉嫌侵犯其知识产权或存在不实内容时,应及时向本网站提出书面权利通知或不实情况说明,并提供身份证明、权属证明及详细侵权或不实情况证明。本网站在收到上述法律文件后,将会依法尽快联系相关文章源头核实,沟通删除相关内容或断开相关链接。 )




















